
图1所示为串阻减压起动和反接制动电气控制线路,主电路中合上QF后,当主触头KM1, KM3闭合,则电动机串联了电阻R开始减压起动,到达稳定转速后,主触头KM3断开,电动机切换为正常运转状态。制动时主触头KM1断开,KM2闭合,电动机转子施加制动反转转矩,电动机接近零转速时,主触头KM2断开,撤去制动反转转矩,电动机停转。
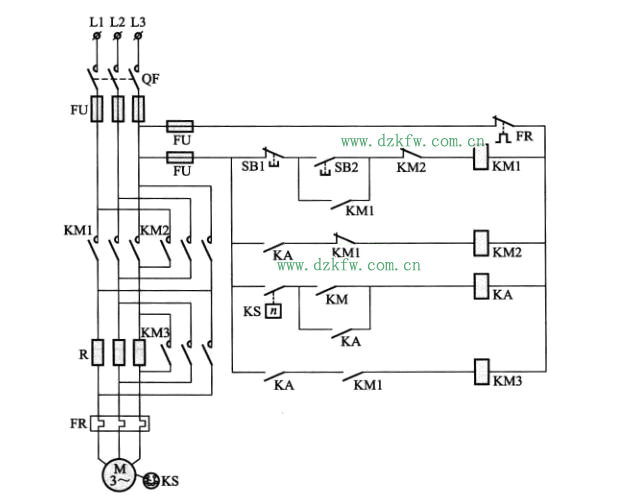
图1:减压起动与反接制动
二、分析
图2所示为plc替代控制的主电路,与继电器接触器控制时的主电路基本保持不变,为PLC提供电源的两路线则采用变压器输出。
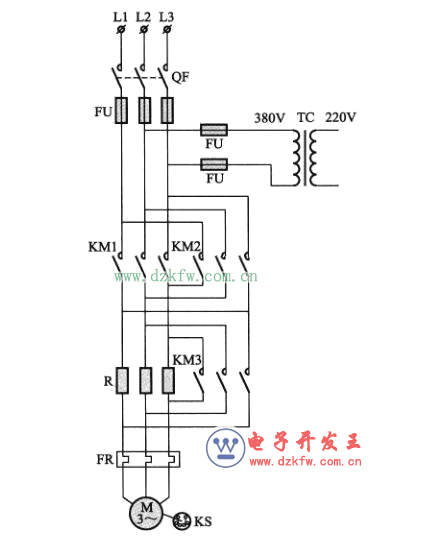
图2:主电路
图3所示为PLC控制的 I/0接线图。
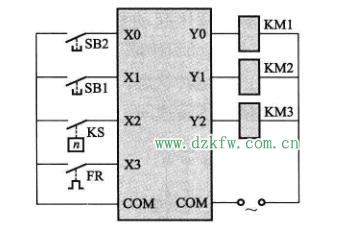
图3:PLC的IO接线图
图4所示为电动机串电阻起动反接制动控制线路,按下SB2,线圈KM1通电,并通过常开辅助触头KM 1自锁,主电路中电动机M通过串电阻R进行减压起动。
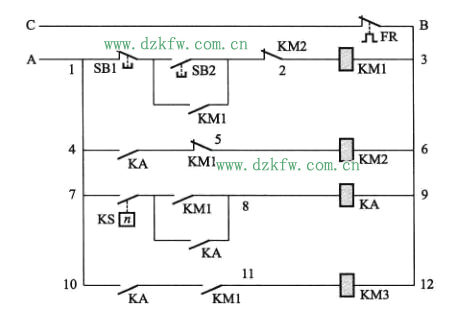
图4:串电阻起动反接制动电路
电动机M起动后不断升速,到达速度继电器KS的额定转速后将使该速度继电器闭合,因该支路的常开触头KM1已闭合,所以继电器线圈KA将闭合并通过常开辅助触头KA自锁。继电器线圈KA一旦通电,导致KM3线圈通电,主电路中形成主触头KM1, KM3通电,KM2断电的状态,电动机M全压稳定转动。
SB1是总停开关,按下SB1导致接触器线圈KM1断电,这将导致线圈KM2通电,线圈KM3断电。主电路中因主触头KM1, KM3断电.KM2通电,转子上施加了反转转矩,导致电动机M快速降速。
当电动机快速降速至速度继电器KS的额定转速时将断开,电动机停转。本控制线路中,共有四个回路:
1、A――1――2――3――B――C
2、A――1――4――5――6――B――C
3、A――1――7――8――9――B――C
4、A――1――10――11――12――B――C
三、程序
图5所示为根据逐行回路转换法得到的初步转换梯形图,该图直接将四个回路转换为一个四行的梯形图,但初步转换梯形图还须根据梯形图若干绘制原则进行合理修改。

图5:初步转换梯形图
梯形图修正规则如下:
1、接入常开型输人电气元件时,梯形图与电气控制图中各触头形式一致。
当PLC的 I 口接入常开按钮或常开触头时,与之对应的PLC内部编程元件与继电器接触器控制线路中按钮或触头的常开、常闭形式完全一致。
如果图4中 I 口接入常开按钮SB1,则梯形图第1支路中对应的编程元件习为常闭触头,
继电器接触器控制线路中,A――1――2――3――B――C 回路中SB1也是常闭触头形式,两者完全一致。
反之,如果PLC的 I 口接人SB1常闭按钮,则因继电器接触器控制线路的A-1-2-3-B-C回路中SB1是常闭形式,转换为梯形图时,第1支路中对应的编程元件X1就应为常开触头,两者触头形式刚好相反。
2、触头不直接与右母线相连,线圈不直接与左母线相连。
梯形图每一行从左母线开始并终止于右母线,触头不能与右母线直接相连,线圈不能与左母线直接相连。www.dzkfw.com.cn版权所有!图5中第1, 3, 4, 6支路中的常闭触头X3直接接在了右母线上,因与各自的线圈互换位置,才能符合“触头不接右母线”的规则。
3、较多串联触头支路置于上,较多并联触头回路置于左。 在一条梯形图支路中,几个触头并联的回路应置于左母线端,并联触头越多,回路位置越靠左;支路与支路之间,串联触头多的支路应置于梯形图上部位置,例图5中,第1,2,4,5支路的并联回路按本规则应置于梯形图的左母线处。
4、受线圈控制的触头所在支路置于线圈支路之后。
图5中第3支路的TO触头受第5支路线圈TO控制,应将第3支路置于线圈TO所在支路(第5支路)之后,才能使梯形图逻辑清晰,容易读懂。
5、同一编号线圈不重复,一条支路中多个线圈可并联输出。
同一编号的线圈在一个程序中使用两次称为重复线圈输出,极易引起误操作,应尽量避免使用,而且一条支路中的两个或两个以上不同编号的线圈,则可以采用并联的方式输出,但不能串联。
根据上述规则修正后的梯形图如图6所示。此外,梯形图还应根据梯形图简化规则进行化简,以提高PLC程序的简洁性与执行效率,例图6中第3, 5支路中的常闭触头X3可根据后述的简化规则省略。
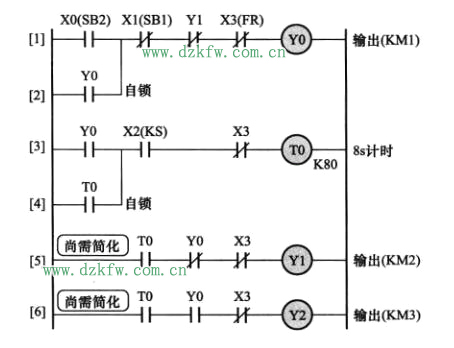
图6:修改后的梯形图
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底