
1.概述
四工位组合机床由四个工作滑台各载一个加工动力头,组成四个加工工位完成对零件进行铣端面、钻孔、扩孔和攻丝等工序的加工,采用回转工作台传送零件,有夹具、上、下料机械手和进料器四个辅助装置以及冷却和液压系统。系统中除加工动力头的主轴由电动机驱动以外,其余各运动部分均由液压驱动。机床的四个动力头同时对一个零件进行加工,一次加工完成一个零件。
2.控制要求和工作方式
本机床共有连续全自动工作循环、单机半自动循环和手动调整三种工作方式。连续全自动和单机半自动循环的控制要求为:按下启动按钮,上料机械手向前,将待加工零件送到夹具上,同时进料装置进料,然后上料机械手退回原位,进料装置放料,回转工作台自动微抬并转位,.接着四个工作滑台向前,四个动力头同时加工,加工完成后,各工作滑台退回原位,下料机械手向前抓住零件,夹具松开,下料机械手退回原位并取走已加工完的零件,完成一个工作循环,并开始下一个工作循环,实现全自动工作方式。如果选择预停,则每个工作循环完成后,机床自动停止在初始位置,等到再次发出启动命令后,才开始下一个循环,这就是半自动循环工作方式。
3.系统的硬件构成
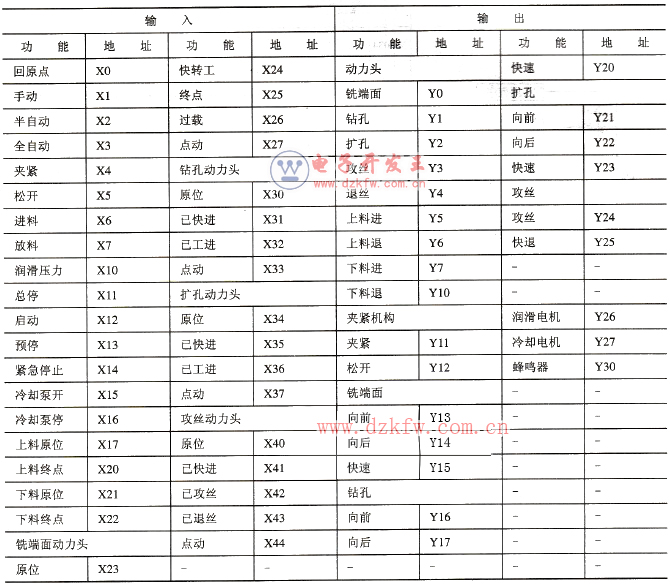
本组合机床由PLC组成的电控系统共有各种输入信号约37个,输出信号25个。输入元件中包括工作方式选择开关、启动、预停、急停按钮,用于检测各工位工作进程的行程开关和压力继电器等等。输出元件包括控制各动力头主轴电动机运行的接触器线圈,控制各工位向前与向后、快速以及攻丝、退丝、夹紧、松开的电磁换向阀线圈。根据组合机床的工作特点,选用三菱FX2N-64MR型PLC,即可满足输入输出信号的数量要求,同时由于各工位动作频率不是很高,但控制线路电流较大,故选用继电器输出方式的PLC,系统的输入/输出信号地址分配表如表4-4所示。
表4-4 系统的输入/输出信号地址分配表
4.PLC控制系统的软件设计
本机床PLC控制系统的软件由公用程序、全自动程序、半自动程序、手动程序、全线自动回原点程序以及故障报警程序等六部分组成,程序总体结构图如图4-46所示。
公用程序主要用来处理组合机床的各种操作信号,如启动、预停、紧急停止以及各工位的原位信号、机床启动前应具备的各种初始信号、工作方式选择信号、各种复位信号,并将处理结果作为机床启动、停止、程序转换或故障报警等的依据,公用程序一般采用经验法设计,其梯形图如图4-47所示。
故障报警程序包括故障的检测与显示,故障检测由传感器完成,再送入PLC,故障显示采取分类组合显示的方法,将所有的故障检测信号按层次分成组,每组各包括几种故障,本系统分为:故障区域,故障部件(动力头、滑台、夹具等),故障元件三个层次,当具体的故障发生时,检测信号同时送往区域、部件、元件三个显示组。这样就可以指示故障发生在某区域、某部件、某元件上。
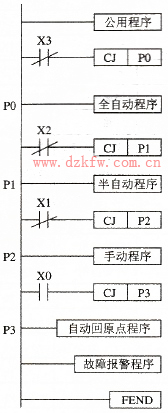
图4-46 PLC的总体结构图
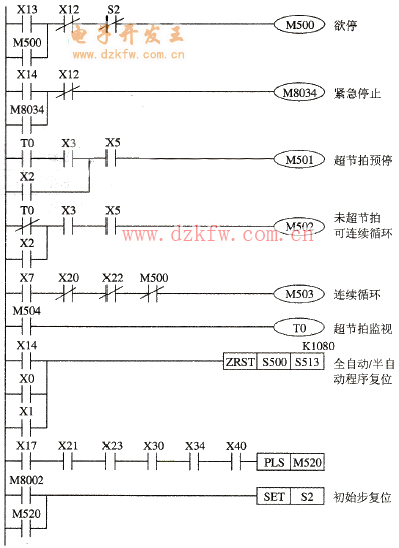
图4-47 公用程序梯形图
全自动程序是软件中最重要的部分,它用来实现组合机床在无人参与的情况下对成批工件进行自动地连续加工。在全自动工作方式下,当机床具备所有初始条件后,按下启动按钮X12,机床即按控制要求所述工艺过程工作,各动力头进行各自的工作循环,循环结束时重新回到各自的初始位置并停止。本文以铣端面和钻孔工位为例,着重分析全自动程序的设计,结合表4-3 I/O地址的分配,可以画出这两个工位的状态流程图如图4-48所示。
需要指出的是:在图4-48中,我们设置了预停功能和超节拍保护功能。
(1)预停功能:当按下预停按钮X13,M500为“1”状态,M503为“0”状态,如图4-47所示。这样当组合机床进展到S513步且X21=1时,将转入初始步S2,并自动停止,而不会转入S500进入下一个循环。
(2)超节拍保护:当组合机床进行超节拍保护时,超节拍监控定时器T0将动作,(由S500置位M504),使M501为“1”状态,M502为“0”状态,如图4-47所示,当机床进行到S511步时,将转入初始步S2停止,不会继续往下运动。
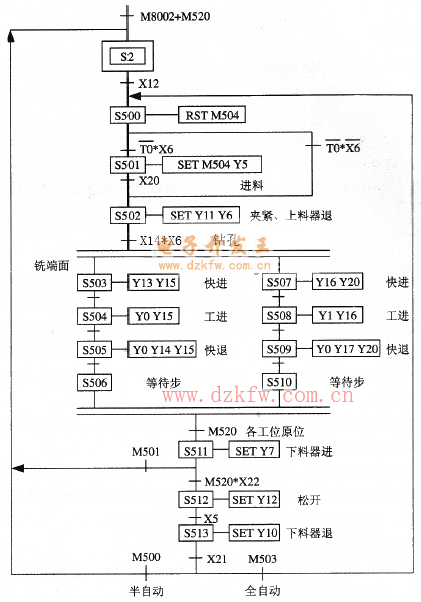
图4-48 全自动/半自动程序流程图
依照上述方法,同样可以把其他几部分的程序流程图设计出来。
5.系统调试与运行
系统调试将手动与自动操作控制独立分开,自动操作控制首先保证单机程序调试成功后,再转入连续控制,最后连接整个系统试运行。由于PLC可灵活、方便地通过编程夹改变控制过程,使调试变得更简单。本系统经过一段时间运行表明,该系统性能可靠,自动化程度高,完全能满足生产工艺要求,它不仅提高了生产效率,而且大大减轻了劳动强度,改善了工作环境。
6.结束语
PLC作为新一代的工业控制装置,具有开发柔性好,接线简单,安装方便,抗干扰性强等特点,用它来控制四工位组合机床这样复杂的生产设备,是理想的选择。在实际应用中,对这样理想的控制器也采取了一定的保护措施。如本系统中,由于接触器和电磁阀较多,为防止电磁干扰,在PLC的输出端与电磁阀、接触器线圈之间增加了固态继电器进行隔离,这样就避免了可能产生的误动作。实践证明,这种隔离措施行之有效。
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底