
文章目录
目录
文章目录
一、前言
西门子200PLC步进控制:使用200编程软件,使用pls指令控制步进电机
一、在运动控制中 PLC,步进驱动器,步进电机之间的关系
1.PLC
使用PLC向外发送脉冲,由脉冲来控制运动,PLC分3种类型:晶体管(t),晶闸管(s),继电器(r) ,驱动步进电机PLC需要用晶体管型,这主要与机械结构有关。
以西门子200为例,有两个脉冲输出点q0.0,q0.1,另外供电需要24v.
2.步进驱动器
步进驱动器接收PLC发来的脉冲,是将电脉冲转化成角位移的执行机构,接收到脉冲信号,就驱动电机按设定的方向转定一个固定的角度。
3.步进电机
步进电机根据一定的脉冲走一定的距离,实现定位。
步进电机的原理与特点:
原理:步进电机利用电磁铁原理,将脉冲信号转换成线位移或角位移的电机,每来一个脉冲电机转动一个角度,移动一定的距离。
特点:1.来一个脉冲转一个步距角 2.控制频率可以控制电机转速 3.改变脉冲顺序可以改变转动方向 4.角位移量或线位移量与电脉冲成正比。
二、术语解释
1.周期
周期是指发送一个脉冲所需要的时间
2.频率
在一秒内发的脉冲个数
3.步距角
步距角是指发一个脉冲电机转过的角度另外步距角越小精度越高
一般二相步距角为0.9°/1.8°,三相为0.75°/1.5°,五相为0.36°/0.72°。
4.细分
细分是指:将步距角在进行分解,一般细分为4,8,16,32等等,以两相步进电机的步距角1.8°为例,一个脉冲走1.8°,那么走一圈就是360°/1.8°,也就是需要200个脉冲 ,如果设为8细分,原来1个脉冲走1.8°,现在需要8个脉冲才能走1.8°,那么走一圈就是360/(1.8/8)=1600个脉冲。
细分可以提高更加准确的定位。
三.硬件接线
1.西门子200PLC
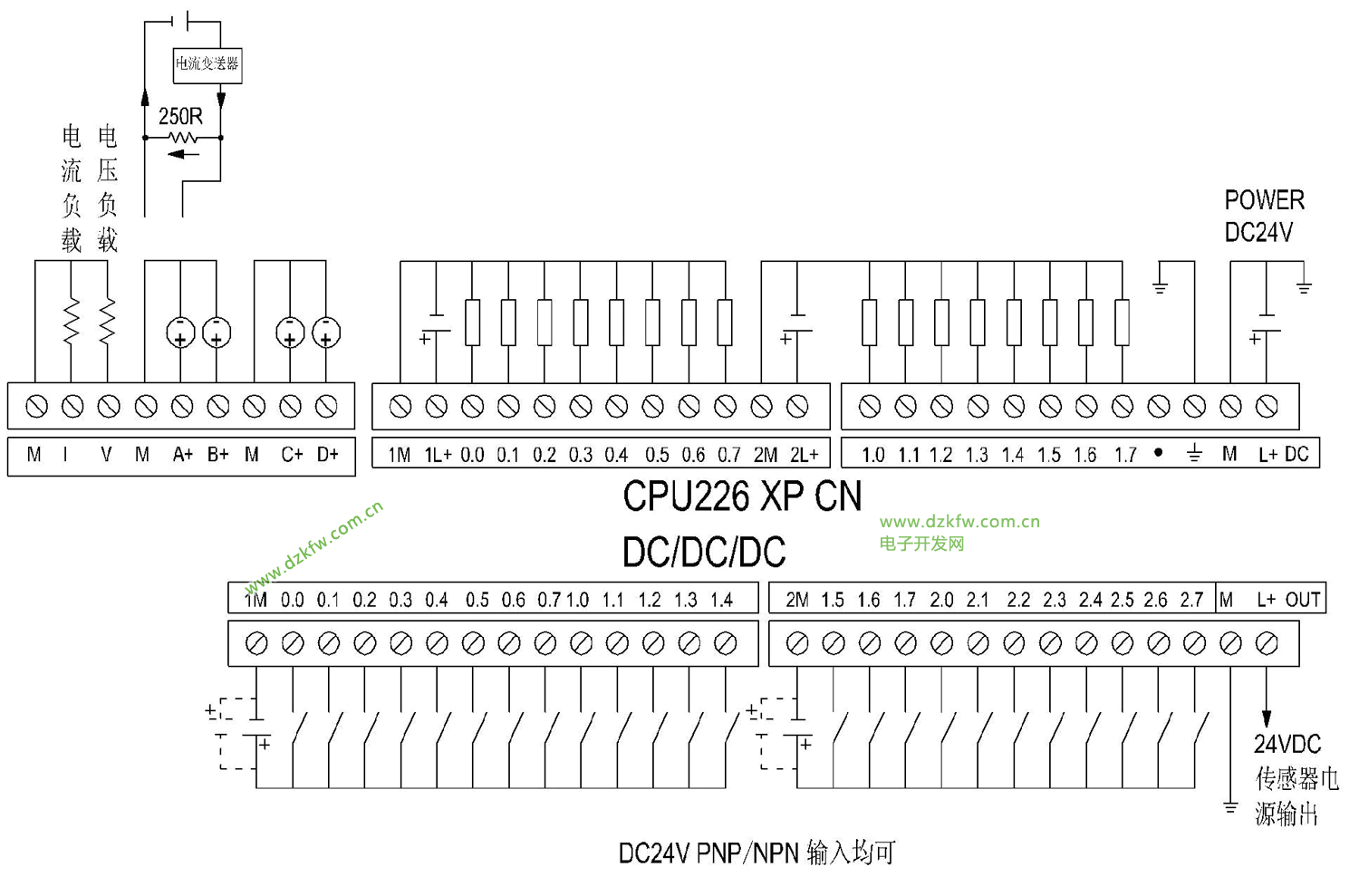


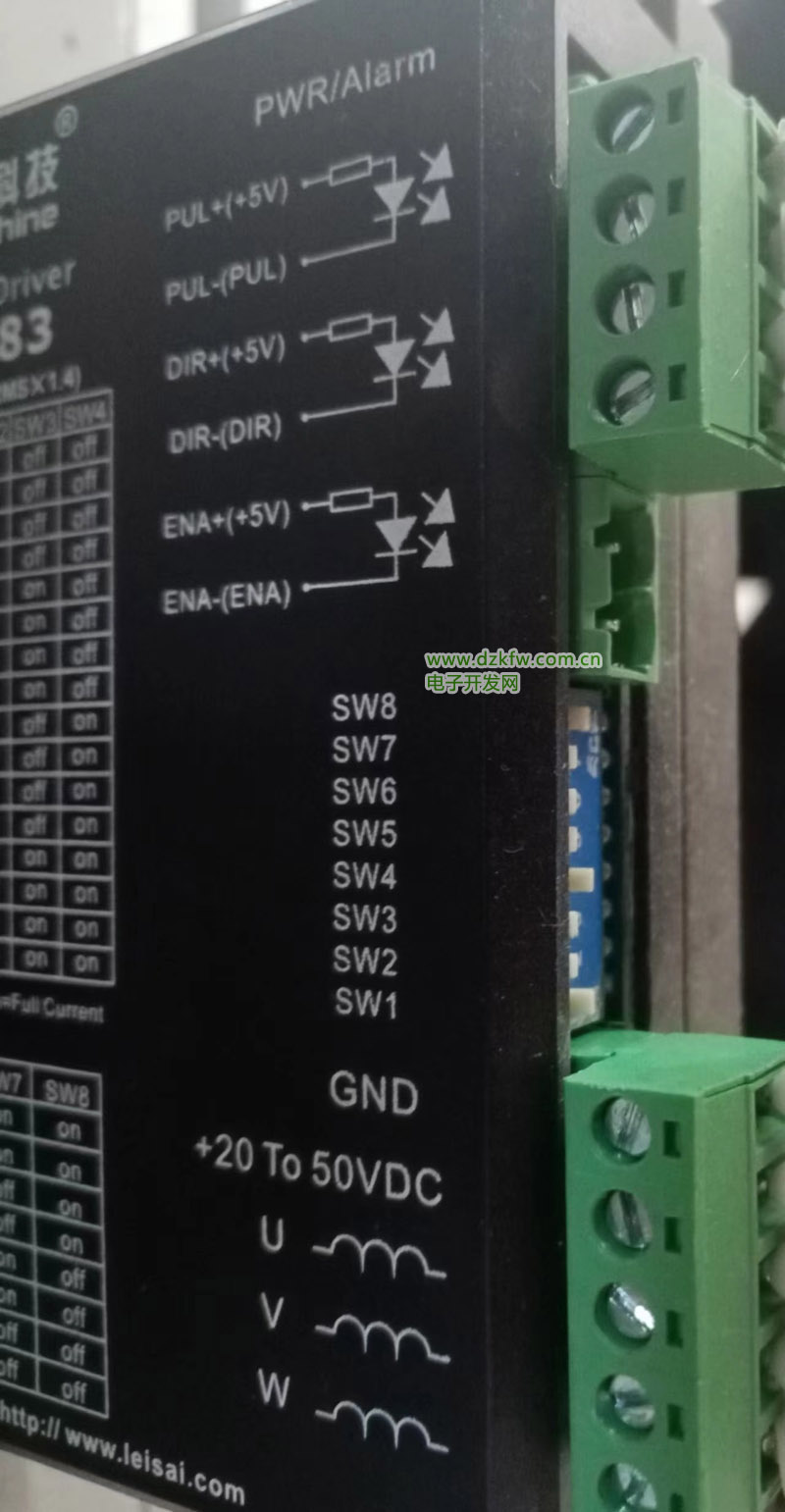
2.步进驱动器
脉冲+ :pul+ 接脉冲输出Q0.0或(Q0.1),方向+:DIR+ 接Q0.0,Q0.1之外的输出点,例如:Q0.2
脉冲-:pul- 和方向-:DIR- 短接,再接到输出端1M.
ENA+和ENA-是使能,不用接。
以三相步进电机为例:共有6根不同颜色的线分别是:棕红黑白蓝黄,下方U,V,W相分别接黄棕,蓝白,黑红。
另外sw1--sw8是控制细分数的。
四.PLC编写程序
这里需要四步:1.控制字节 2.设定周期 3.设定脉冲数 4.触发脉冲指令。前三步也可称为初始化。
这里涉及到相关寄存器,以下为列表:
|
Q0.0 |
Q0.1 | 名称及描述 |
| SMB66 | SMB76 | 状态字节,PTO方式下,跟踪脉冲串的输出状态 |
| SMW68 | SMW78 | 周期值,PTO/PWM的周期值,2-65535ms或10-65535us |
| SMB67 | SMB77 | 控制字节,控制PTO/PWM脉冲输出的基本功能 |
| SMW70 | SMW80 | 脉宽值,PWM的脉宽值0-65535ms或us |
| SMD72 | SMD82 | 脉冲数,PT0的脉冲数,1-4294967295 |
| SMB166 | SMB176 | 段号,多段管线PTO进行中段的编号 |
| SMW168 | SMW178 | 多段管线PTO包络表起始字节的地址 |
这里出现了PTO和PWM,这里解释一下,方便理解:
首先要知道脉冲是通断产生的 这就是一个脉冲,有宽度。
这就是一个脉冲,有宽度。
PWM:脉宽调制,改变脉冲的宽度,例如:
这就改变了通电和断电的时间,但是它无法定位。
PTO:脉宽无法调制,通和断各占50%,可以定位。我们使用PTO。
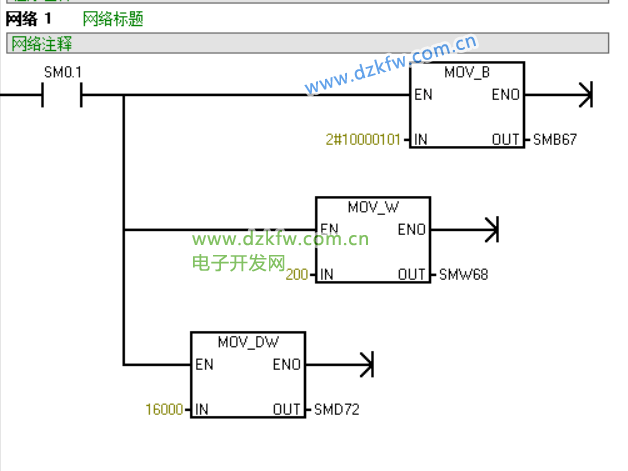
1.初始化
在上面寄存器列表中(以Q0.0为例),找到控制字节SMB67, 它是来控制脉冲输出的基本功能,这是一个字节8个位每个位都有不同的功能,详细看下表:
SMB67=SM67.0--SM67.7
| SM67.0 | PTO/PWM更新周期值 | 0=不更新 | 1=允许更新 |
| SM67.1 | PWM更新脉冲宽度值 | 0=不更新 | 1=允许更新 |
| SM67.2 | PTO更新脉冲值 | 0=不更新 | 1=允许更新 |
| SM67.3 | PTO/PWM时间基准选择 | 0=us | 1=ms |
| SM67.4 | PWM更新方式 | 0=异步更新 | 1=同步更新 |
| SM67.5 | PTO单多段方式 | 0=单段 | 1=多段 |
| SM67.6 | PTO/PWM模式选择 | 0=选用PTO | 1=选用PWM |
| SM67.7 | PTO/PWM脉冲输出 | 0=禁止 | 1=允许 |
根据上表:选择我们所用的PTO,PWM默认选择0,那么2#10000101,或者16#85,要传送到smb67中。
脉冲输出基本功能选择好后,我们还需要设置SMW68周期值(速度)和SMD72脉冲数(距离),只需要再传送范围内的数值就可以了。
这里的sm0.1是上电初始化
2.触发脉冲指令
200PLC中的脉冲指令是pls,填入相应的脉冲输出q0.0就完成了,注意:要用沿指令来触发!
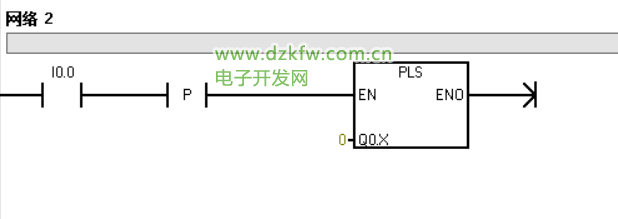
写好之后编译,下载到PLC就可以运行了!
总结
以上就是这次内容,这里讲解了200PLC控制步进电机的入门程序。
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底