
1.确认设计任务书
三级皮带运输机分别由M1、M2、M3 3台电动机拖动,启动时要求10s的时间间隔,并按M1、M2、M3的顺序启动;停止时要求30s的时间间隔,并按M3、M2、M1的顺序停止。三级皮带运输机工作示意图如图7-22所示。三级皮带运输机主电路如图7-23所示。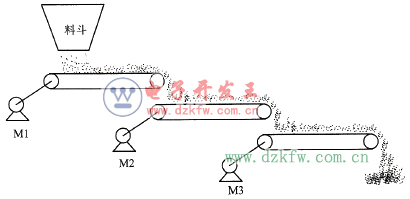
图7-22 三级皮带运输机工作示意图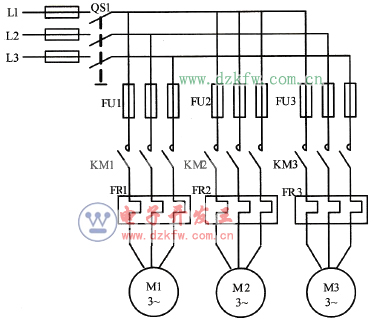
图7-23 三级皮带运输机主电路图
2.确定外围I/O设备
(1)输入设备:采用3个按钮,分别为启动按钮、停止按钮、急停按钮;3个热继电器。
(2)输出设备:采用3个接触器分别控制3级皮带的电动机。
3.选定PLC的型号
选用的PLC是西门子公司的S7-200系列PLC-CPU224。
4.编制输入/输出元件地址分配表
对输入元件和输出元件分配I/O地址,其分配表见表7-2。
表7-2 输入/输出元件地址分配表
5.硬件连接图
本系统的工作电源采用24V DC源输入、24V DC输出的形式,根据外围I/O设备确定PLC外部接线图,如图7-24所示。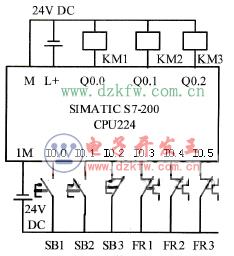
图7-24 三级皮带运输机PLC外部接线图
6.程序设计
(1)方法一:简单指令编程方法
表7-3为三级皮带运输机控制梯形图。根据3台电动机启动与停止的顺序可知,实际上I0.0启动M1,I0.1停止M3,M1的停止、M2的启动/停止以及M3的启动都是由定时器产生的脉冲信号来实现操作,本例选用T37~T40这4个100ms的定时器分别实现10s间隔定时和30s间隔定时。因为T37~T40是100ms定时器,所以可以使用自复位来产生脉冲信号,使编程更容易。建议读者使用定时器时,尽量选用100ms的定时器。
表7-3的网络1中,使用的是热继电器FR1、FR2、FR3的动合触点。这是因为在图7-24所示的PLC外部接线图中,热继电器以动断触点的形式接入电路中。当电动机正常工作时,热继电器不动作,I0.3、I0.4、I0.5的输入端为“1”;当继电器动作时,FR1、FR2、FR3断开主电路,则I0.3、I0.4、I0.5的输入端为“0”。表7-4中的网络1亦是如此。
表7-3 三级皮带运输机控制方法一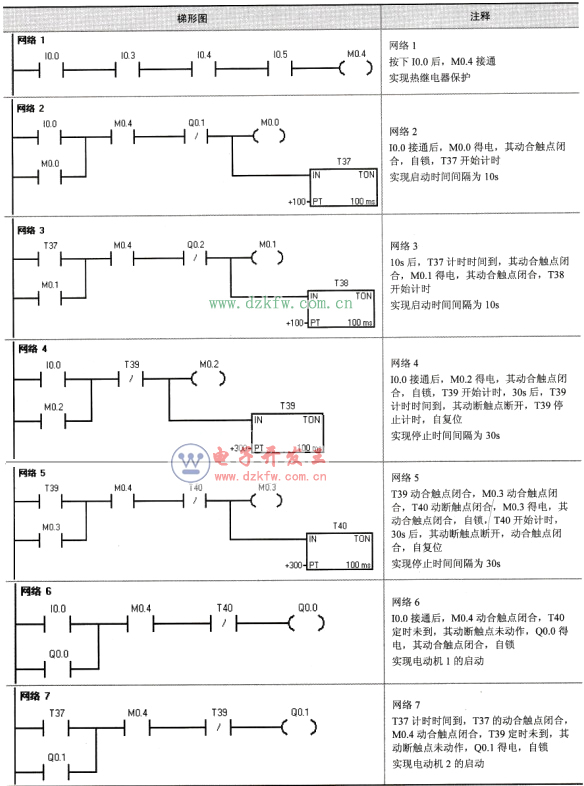

(2)方法二:复杂指令编程方法
表7-4是使用比较指令编写的程序,在程序中电动机的启动和关断信号均为短信号。在表7-4中,采用通电延时定时器T37实现M2和M3的启动,采用断电延时定时器T38实现3台电动机的停止。T38的定时值设定为610,这使得再次按下启动按钮I0.0,T38不等于600的比较触点为闭合状态,M1能够正常启动。对比表7-3与表7-4的程序可以发现使用一些复杂指令,可以使程序变得简单。
表7-4 三级皮带运输机控制方法二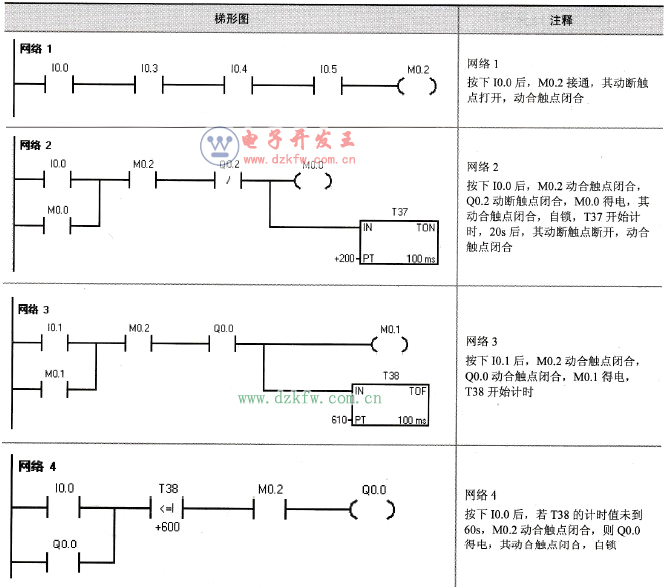

 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底