
运动控制在工控领域是十分常见的,我们经常用到的运动控制的电机主要分两大类,一种是伺服电机控制,还有一种是步进电机控制。
本文主要讲解的是伺服电机的位置控制模式。伺服电机的控制模式分三种:1、位置控制模式,2、速度控制模式、3、扭矩控制模式。其中后两种模式都比较简单,应用起来也非常的简单。所以我本次讲解的是比较麻烦的位置控制。
根据控制方式来说我了解的的控制方式也是大体的分两种:
一、 基于PLC的运动控制主要分两大部分:1、PLC,功能是发送运动的脉冲数,充当运动控制的发号施令者,伺服电机运动到什么位置,全靠PLC发送的脉冲数来决定。2、伺服电机和伺服驱动器,伺服驱动器和伺服电机配套为运动控制的执行机构,根据接收到的脉冲数和方向运动相应的距离
二、基于运动控制卡的运动控制方式也是分两大部分:1、运动控制卡,功能是和PLC一样的,充当运动控制的发号施令者,伺服电机运动到什么位置,全靠运动控制卡发送的脉冲数来决定。2、伺服电机和伺服驱动器,伺服驱动器和伺服电机配套为运动控制的执行机构,根据接收到的脉冲数和方向运动相应的距离。
我对运控控制卡的研究比较少,但是根据我个人的看法,运动控制卡主要是集成了硬件和软件,他们相比于PLC更容易控制多轴的控制,一般运动控制卡的厂家都已经编写好的函数,我们只需要根据函数的功能去调用就好了。本文主要是讲解PLC和伺服驱动搭建的运动控制。
首先我们了解一下伺服驱动器的接线,了解一下运动控制都需要哪些信号。
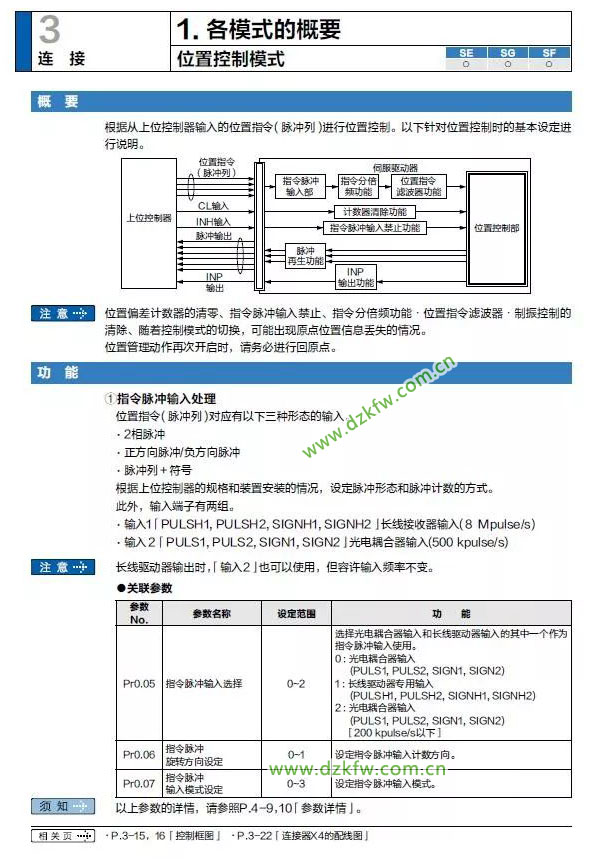
松下说明书的位置控制
这里主要是写了位置控制下的关键参数,这些要注意一下关键参数,参数不一样接线方式也要跟着变换。
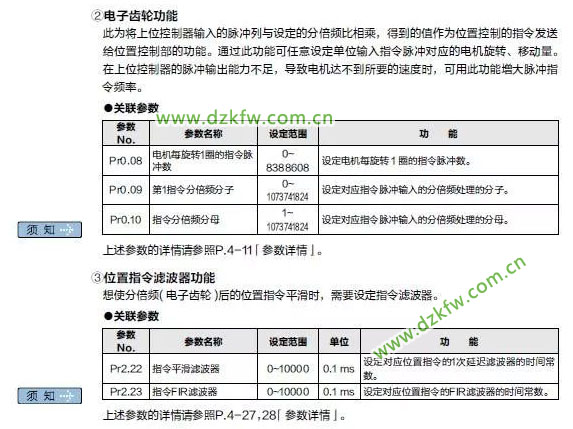
pr008,电机转一圈所需要的脉冲数
这里设置的PR0.08说的是伺服驱动器转一圈,PLC或者运动控制卡发送多少个脉冲,伺服驱动器控制伺服电机转一圈。这个参数很重要,这个参数要和PLC上的组态程序要对应好,不然控制会出现偏差。不同的驱动器品牌的主要参数都差不多,这个要根据具体的说明书来设置。
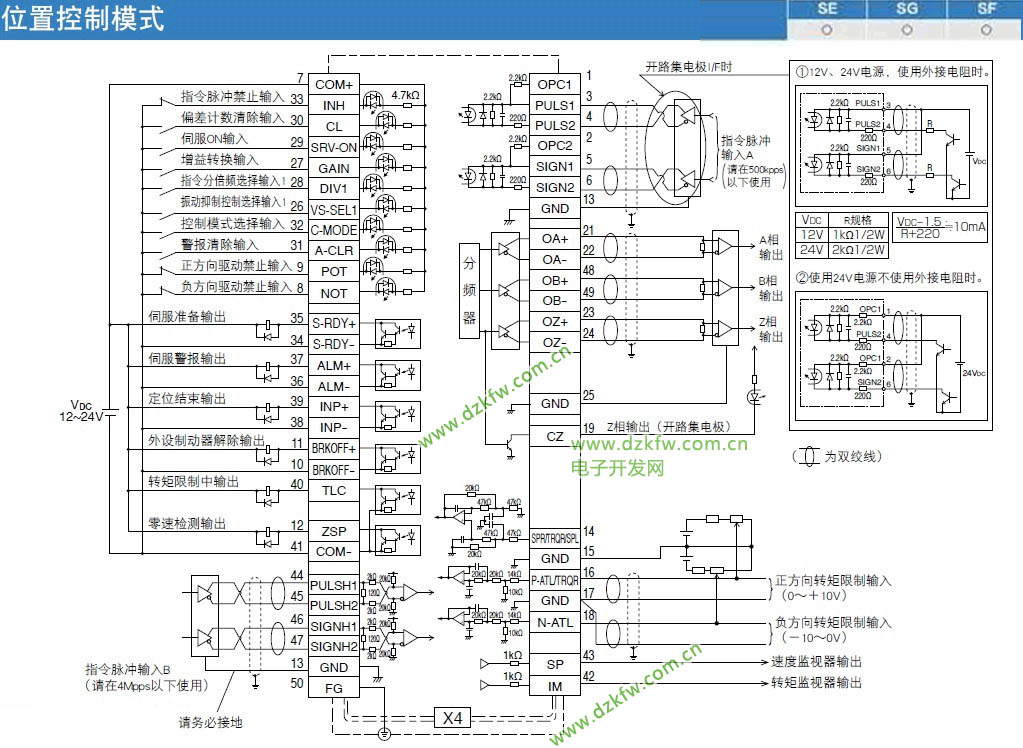
驱动电机的接线
这里主要说的几个IO,脉冲、伺服使能、刹车、还有两个正负极限。这是一个基本的运动控制需要的接线。也就是说在PLC端我们需要这么多个输出给伺服驱动器,正负极限可以不需要PLC输出,直接接的限位开关就好。
伺服驱动器这边基本接线和主要参数设置就这么多,接下来我们可以看一下西门子PLC上要如何组态来配置相应的控制程序。大概的了解一下运动控制的工作原理。在下一节我才将到怎么在PLC上编程去控制电机的运动。
西门子smart 200的编程软件STEP 7-MicroWIN SMART点击向导,它会带着你配置运控控制所需要的参数,简化编程。
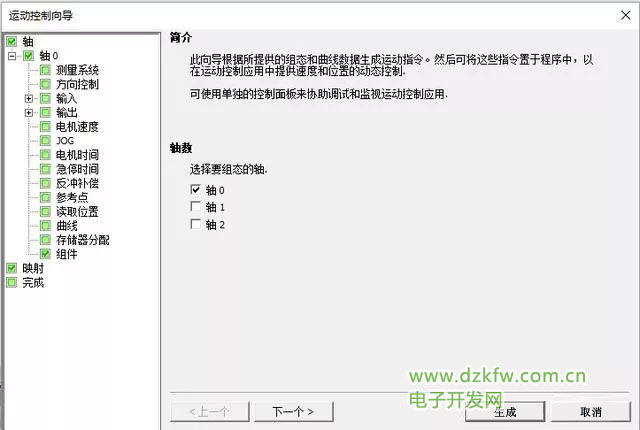
1、 在向导中点击运动,弹出运动的向导。

2、选择要组态的轴,根据PLC的型号不一样,一个PLC能控制的轴的数量也不一样,我这里能组态三个轴,代表这个PLC最多能同时控制三个伺服电机。
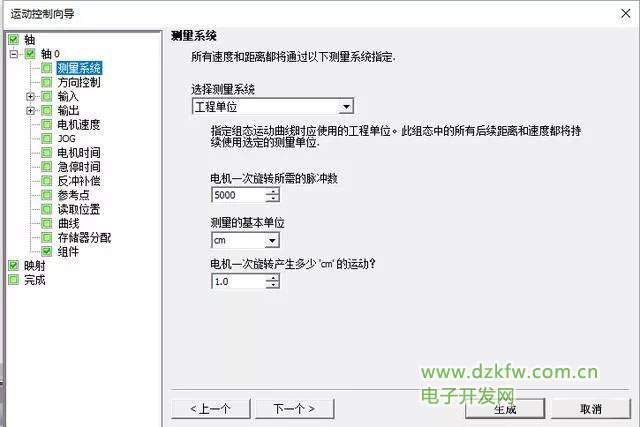
3、选择测量系统,这里电机转一次需要的脉冲数要和伺服电机的上设置的脉冲数要一致。
电机转一次产生多少位移这个就要看你的运动控制系统的丝杠或者伺服缸的导程,比如与导程是10的伺服缸,那么电机转一次就移动1cm,这个看实际的情况而定。
4、输入配置,这里主要是三个参数要配置,上极限和下极限,这是判断运动控制的极限位置,还有就是参考点(我们常说的零点)。这三个可以自由搭配输入点,我建议一个系统最少是需要三个限位开关,一个是上极限,一个是下极限,还有一个就是原点。但是运动控制最少只需要一个点就可以实现位置控制,那就是原点。但是这样会出现跑出极限的危险。最完善的运动控制应该是有五个,两个上极限,两个下极限外加一个原点。两个上极限一个接PLC一个接伺服驱动器,两个下极限一个接PLC一个接伺服驱动器,还有最后一个原点接PLC。但是这样会增加成本,所以我们一个用三个限位开关就够了
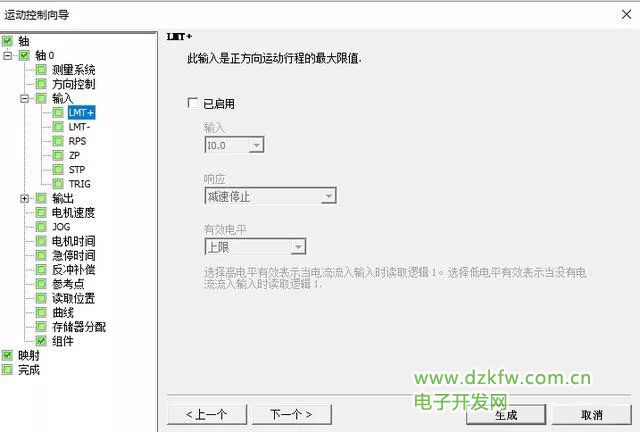
5、配置限位开关的点位和输入信号。

6、方向输出,这个是控制方向输出控制的。

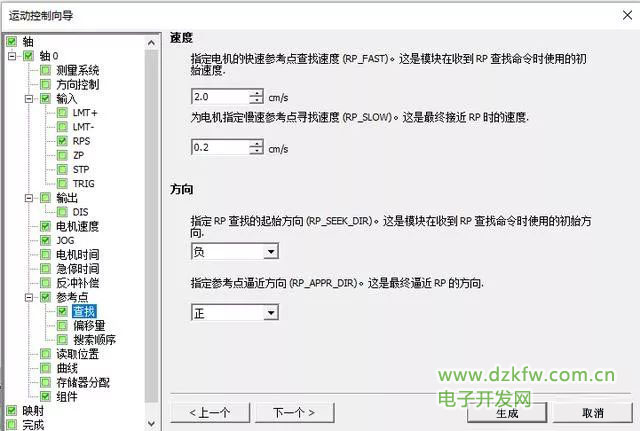
7、参考点的配置,配置回归原点的速度和原点信号
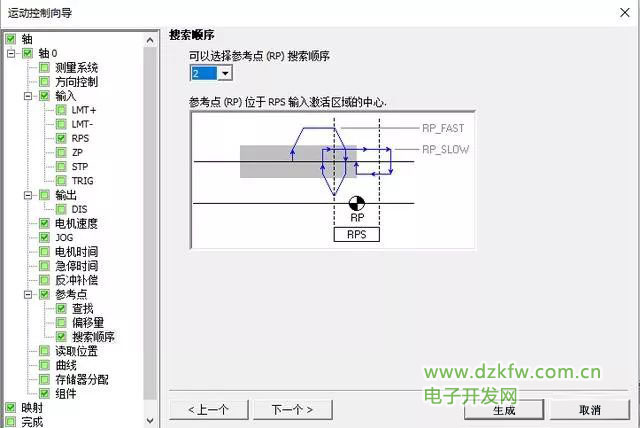
9、搜索原点的方式
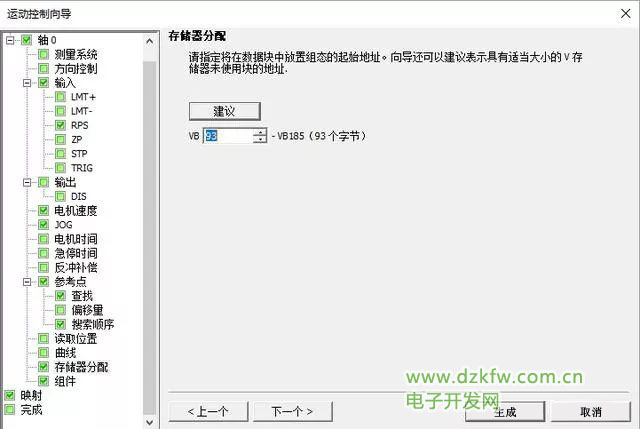
10、储存器的分配
11、配置完成的结果

现在总结一下一个运动控制系统主要需要哪几个参数:1、控制系统的导程。2、伺服电机转一圈需要的脉冲数(PLC和伺服驱动器上的参数设置要一致)。3、原点限位开关。4、上极限开关。5、下极限开关。
在我们调试之前一定要确定这么几个参数才能够做到位置控制,下一篇文章我才会将PLC的几个运动控制指令。
留言处大家可以补充文章解释不对或欠缺的部分,这样下一个看到的人会学到更多,你知道的正是大家需要的。。。
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底