

一、动作分析
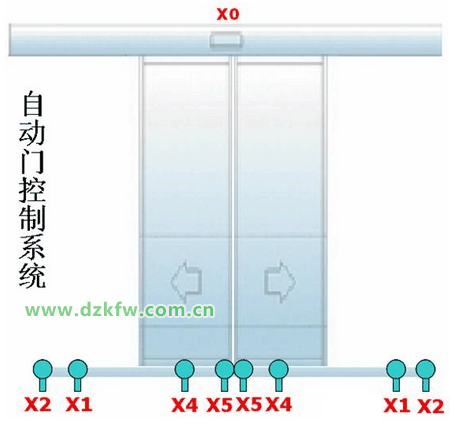
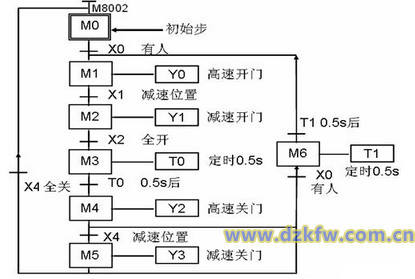
人靠近自动门时,感应器X0为ON,Y0驱动电动机高速开门,碰到开门减速开关X1时,变为低速开门。碰到开门极限开关X2时电动机停转,开始延时。若在0.5s内感应器检测到无人,Y2起动电动机高速关门。碰到关门减速开关X4时,改为低速关门,碰到关门极限开关X5时电动机停转。在关门期间若感应器检测到有人,停止关门,T1延时0.5s后自动转换为高速开门。
二、硬件设计
根据前面的学习,再依据图中的标示,同学们可以自己画出输入及输出端口的分配,在这不加深述
三、顺序功能图的绘制
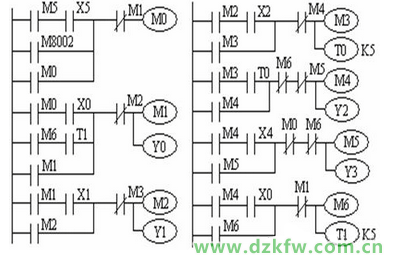
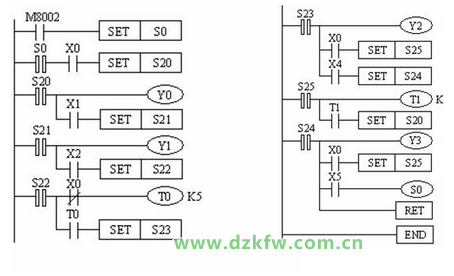
四、三菱plc自动门控制系统编程梯形图
1、选择序列起-保-停电路编程
2、选择序列结构的步进指令编程


 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底