
PID控制(Proportion Integration Differentiation 比例积分微分),又称比例积分微分控制,是一种闭环控制。生活中很多设备都应用了PID闭环控制技术,比如汽车定速驾驶、无人机悬浮控制、变频空调恒温技术,水厂恒压供水等。
采用PID技术可以有效改善控制回路滞后和过调问题,当然这些问题无法彻底解决。PID运算包括三个部分,比例运算、积分运算和微分运算。
比例运算是将偏差按比例放大,可以提高控制速度,但存在稳态偏差。所谓稳态偏差就是输入与输出达到平衡,但是与目标值还有一定距离。比例运算p值较小时,响应速度慢,p值较大时,响应速度快但是震荡严重。简单理解就是比例运算把设定值按照一定速度向设定值推进,但是推到快到设定值值时就推不动了(推力和阻力达到平衡)。
积分运算是对偏差信号进行积分运算,消除比例运算引起的稳态偏差,但是积分运算具有滞后性,会使实际值超出设定值。简单理解就是积分运算可以打破比例运算中推力和阻力平衡的状态,将实际值继续往设定值方向推进,但由于没有反向作用力,一不小心容易推过界(具有滞后性)。
微分运算是对偏差信号进行微分运算,当实际值与设定值越接近时,偏差不断减小,此时通过微分运算可以不断增加阻力,越接近设定值阻力越大,从而避免超过设定值。简单理解就是微分运算提供了一种反向作用力,具有超前预测性。
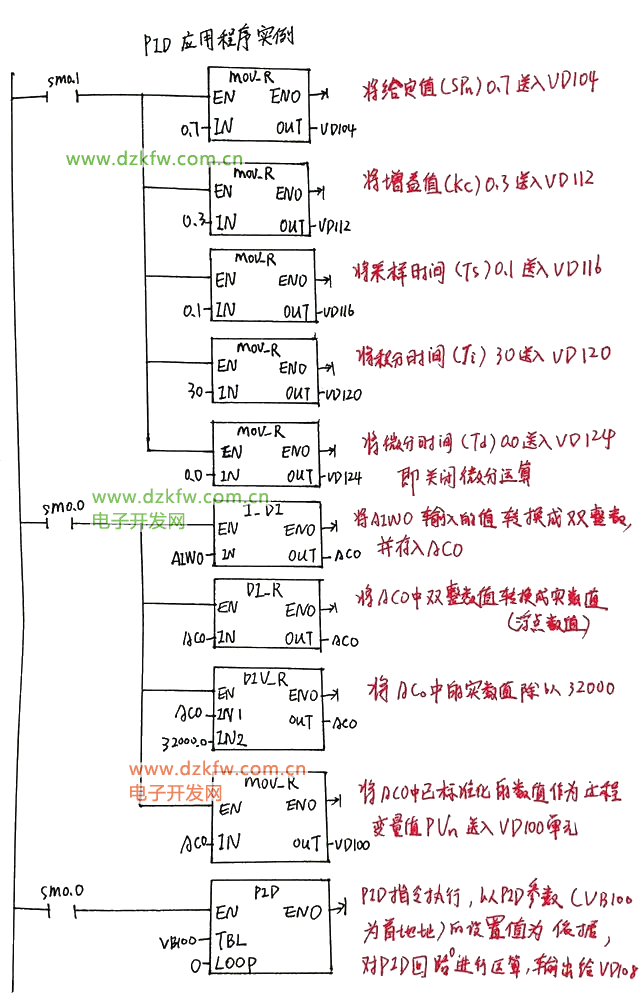
西门子PLC的PID程序示例
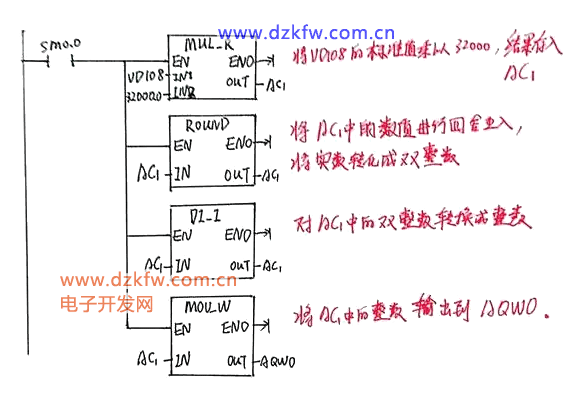
西门子PLC的PID程序示例
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底