
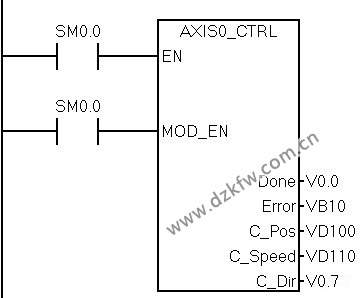
1.启用并初始化轴
AXISx_CTRL 子程序(控制)启用和初始化运动轴,方法是自动命令运动轴每次CPU 更改为 RUN 模式时加载组态/曲线表。
在项目中只对每条运动轴使用此子程序一次,并确保程序会在每次扫描时调用此子程序。使用 SM0.0(始终开启)作为 EN 参数的输入。
管脚含义:
MODE: 启用模块。1=可发送命令;0=中止进行中的任何命令
Done :完成标志位
Error :错误代码(字节)
C_Pos :轴的当前位置(绝对定位或者相对定位),工程单位:Real 型数据;相对脉冲:DINT型数据
C_Speed :轴的当前速度 ,Real 型数据
C_Dir :轴的当前方向(1=反向,0=正向)
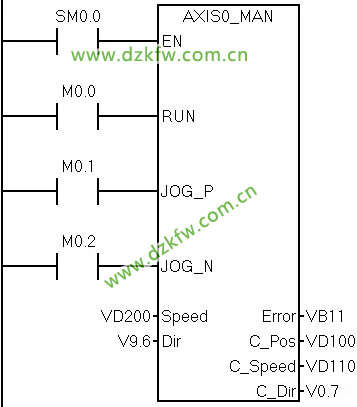
2. 手动控制轴
AXISx_MAN 子例程(手动模式)将运动轴置为手动模式。这允许电机按不同的速度运行,或沿正向或负向慢进。
在同一时间仅能启用 RUN、JOG_P 或 JOG_N 输入之一。
管脚含义:
RUN:1=轴手动运行(速度和方向分别由 Speed和 Dir 管脚控制)0=停止手动控制
JOG_P:1=正转点动控制
JOG_N:1=反转点动控制
Speed:RUN运行时的目标速度,Real 型数据
Dir:RUN运行时的方向
Error :错误代码(字节)
C_Pos :轴当前位置(绝对定位或者相对定位),工程单位:Real 型数据;相对脉冲:DINT型数据
C_Speed :轴当前速度 ,Real 型数据
C_Dir :轴当前方向(1=反向,0=正向)
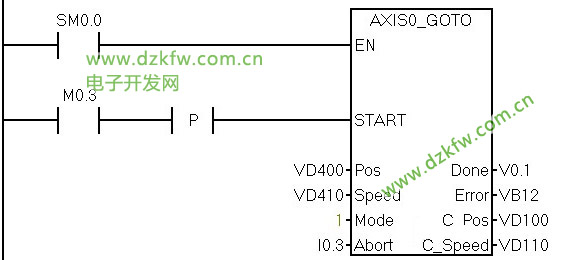
3. 绝对或者相对定位
AXISx_GOTO 子程序命令运动轴转到所需位置。
管脚含义:
START:每接通一个扫描周期,就执行一次定位
Pos:目标位置(绝对定位为坐标点,相对定位为两点间距离),工程单位:Real 型数据;相对脉冲:DINT型数据
Speed:目标速度,Real 型数据
MODE:移动模式 0:绝对位置 1:相对位置 2:单速连续正向旋转 3:单速连续反向旋转
Abort:停止正在执行的运动
Done :完成标志位
Error :错误代码(字节)
C_Pos :轴当前位置(绝对定位或者相对定位),工程单位:Real 型数据;相对脉冲:DINT型数据
C_Speed :轴当前速度 ,Real 型数据
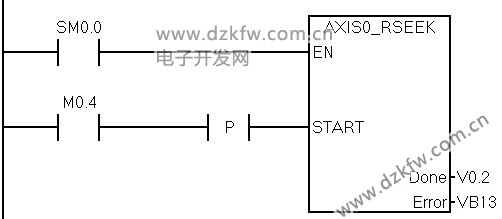
4. 查找参考点
AXISx_RSEEK 子程序(搜索参考点位置)使用组态/曲线表中的搜索方法启动参考点搜索操作。
运动轴找到参考点且运动停止后,运动轴将 RP_OFFSET 参数值载入当前位置。
管脚含义:
START:每接通一个扫描周期,就执行一次查找参考点(参考点查找方式由轴组态确定)
Done :完成标志位
Error :错误代码(字节)
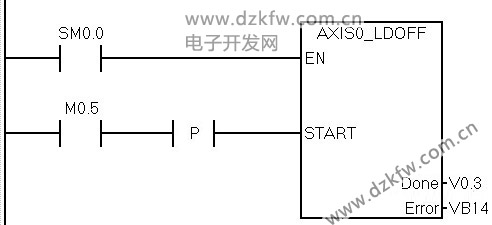
5. 加载参考点偏移量
AXISx_LDOFF 子程序(加载参考点偏移量)建立一个与参考点处于不同位置的新的零位置。
在执行该子程序之前,必须首先确定参考点的位置。还必须将机器移至起始位置。
当子程序发送 LDOFF 命令时,运动轴计算起始位置(当前位置)与参考点位置之间的偏移量。运动轴然后将算出的偏移量存储到 RP_OFFSET 参数并将当前位置设为 0。这将起始位置建立为零位置。
如果电机失去对位置的追踪(例如断电或手动更换电机的位置),您可以使用 AXISx_RSEEK 子程序自动重新建立零位置。
管脚含义:
START:每接通一个扫描周期,就执行一次加载参考点偏移量
Done :完成标志位
Error :错误代码(字节)
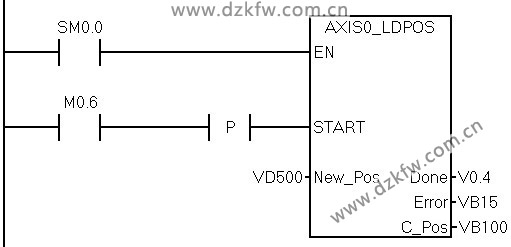
6. 加载位置
AXISx_LDPOS 子程序(加载位置)将运动轴中的当前位置值更改为新值。
还可以使用本子程序为任何绝对移动命令建立一个新的零位置。
管脚含义:
START:每接通一个扫描周期,就执行一次加载位置
New_Pos:要加载为当前位置的值
Done :完成标志位
Error :错误代码(字节)
C_Pos :轴当前位置(绝对定位或者相对定位),工程单位:Real 型数据;相对脉冲:DINT型数据
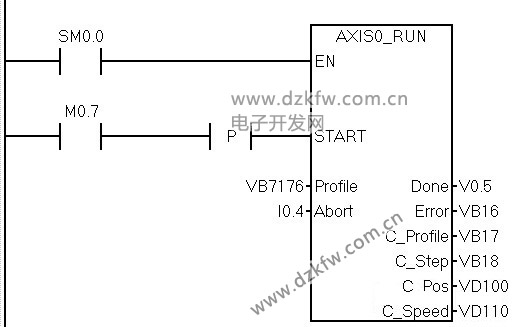
7. 执行曲线运动
AXISx_RUN 子程序(运行曲线)命令运动轴按照存储在组态/曲线表的特定曲线执行运动操作。
管脚含义:
START:每接通一个扫描周期,就执行一次设定的曲线运动
Profile:需要执行的曲线(由地址存储)
Aboyt:停止当前执行的曲线
Done:完成标志
Error:错误代码(字节)
C_Profile:正在运行的曲线
C_Step:正在运行曲线内当前执行的步
C_Pos :轴当前位置(绝对定位或者相对定位),工程单位:Real 型数据;相对脉冲:DINT型数据
C_Speed :轴当前速度 ,Real 型数据
看完这些你学到了吗?
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底