
在自动化和控制系统中,运动控制器和可编程逻辑控制器(PLC)扮演着至关重要的角色。尽管它们经常被用于实现工业机械的自动化控制,但它们的设计目标、功能和应用范围存在显著差异。在工业自动化领域当中,运动控制一直是PLC应用领域当中的重要组成部分。运动控制器专门设计用于精密地控制机械运动的轨迹、速度、加速度和位置。这些设备通常用于要求高精度和复杂运动控制的场合,如机器人臂、CNC机床、半导体制造设备和其他自动化装配线。运动控制器强调高速、精确的点对点移动,以及多轴协调运动的能力。而步进电机由于其性能稳定、响应速度快、运行平稳、噪音低等特点,被广泛应用在有精度要求的定位控制场合。对于绝大多数步进控制系统,都使用的是开环控制,因为控制简单。
有些情况下,增加编码器的方式,组成步进闭环控制系统,既能降低设备体积,还可以减少步进电机丢步的风险,相比伺服系统成本更低。本文以西门子PLC为控制器,结合编码器和步进电机组成闭环系统,以供参考。

1.系统硬件组成
因为需要组成步进闭环系统,所以在选取PLC的时候,需要满足两个条件,支持脉冲输出,支持高速计数器输入。在这里使用S7-200 SMART ST20,它具有2个100KHz的脉冲输出,6个高速计数器,满足步进闭环控制的性能要求。
步进电机使用研控步进电机YK57HB76-04A,该电机步距角为1.8°,保持转矩为2.0 N.m。驱动器使用配套的型号YKE2405M,电流在1.5-4.0A可调,细分可在400-40000之间设置。在本项目中,细分设置为1000,即PLC发送1000个脉冲,电机旋转一圈。

由于闭环的需要,需要使用一款编码器,这里选取欧姆龙的增量编码器E6B2-CWZ6C 1000P/R 3M,其分辨率为1000脉冲/圈,将其直接安装在步进电机的输出轴上。
综上所述,那么我们可以得到该步进控制系统的关系:PLC发送一千个脉冲,步进电机旋转一圈,编码器也旋转一圈。
为了更好的发送脉冲的输入指令,通常使用触摸屏。触摸屏输入脉冲指令,给到PLC,PLC再发送给步进驱动器,步进驱动器驱动电机。完成一系列的控制。在实际应用的时候,为了操作员的易读懂、方便度量,通常将输入的单位转化为毫米。本案使用的是丝杆结构,导程为10mm,即发送1000脉冲,电机移动10mm。本机以威纶通的触摸屏MT8051IP作为参数输入界面,当输入长度为P时,指令脉冲的数量为Q = 100P,步进电机运转时编码器的反馈脉冲为F,F=Q。总的系统硬件方框图如图1示:
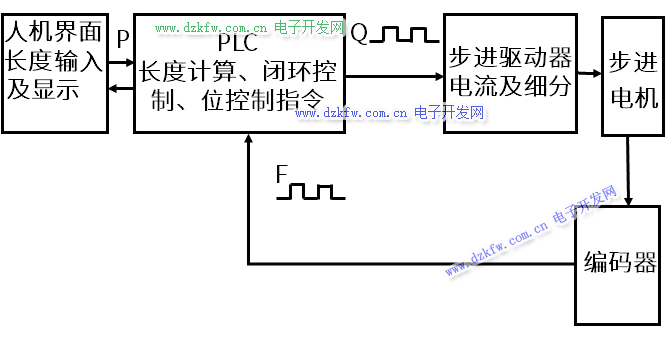
图1 系统硬件方框图片描述
2.系统主要控制功能
系统控制软件功能包括长度与指令脉冲换算,位置控制参数设定及定位控制,脉冲反馈及闭环控制,超差处理等
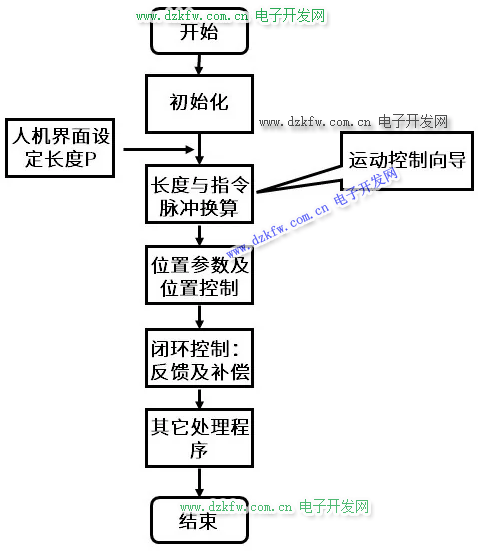
图2 系统软件框图
-
(一)运动控制向导
为了将长度单位与脉冲指令进行换算,S7-200 SMART 提供了一个运动向导的工具,这个工具可以快速的将工程单位转化成步进驱动器相对应的控制脉冲。本案中步进的脉冲细分为1000,导程为10mm,所以在进行运动控制向导的时候,设置方法如图3所示:
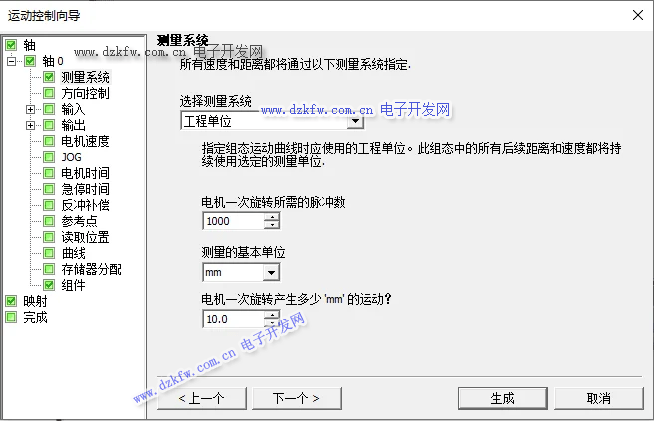
图3 步进测量系统
-
(二)位置指令参数设定
当使用运动控制向导设置完毕之后,会自从生成对应的功能块,在进行定位控制的时候,调用相对应的功能块即可。需要注意的是,使用绝对定位运动,需要先进行回零的设置。在进行绝对定位,使用的功能块是AXIS0_GOTO,在进行位置控制的时候,设置好位置数据,触发V2100.7则可以进行定位控制。
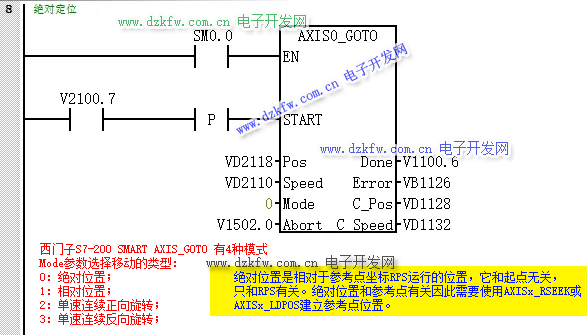
图4 AXIS0_GOTO功能块
-
(三)编码器闭环反馈系统
对于编码器的闭环反馈,可以使用S7-200 SMART的高速计数器向导,来完成相关参数的设置,在进行相关参数设置的时候,需要确定好对应的高速计数器的模式。通常有四种类型的高速计数器,内部方向高速计数器、外部方向高速计数器、加减双相高速计数器、AB正交高速计数器,这四种类型根据是否有复位功能又有所不同。本案使用模式1,带有内部方向控制的单相增/减计数器。使用复位输入。
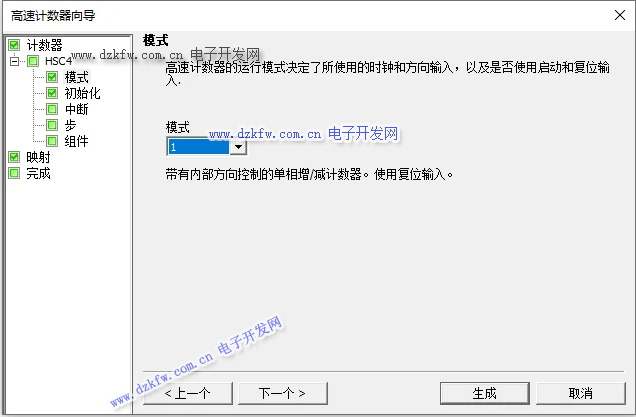
图5 高速计数器向导
当进行运动控制的时候,使用高速计数器的返回值与AXIS0_GOTO的当前位置值进行比较,当两者相等时候,证明没有丢步,当反馈值小于AXIS0_GOTO的位置值,则可能发生丢步的情况,需要进行补偿,通常会设置一定的容差范围,当大于容查的时,则不再进行补偿,需要进行报警处理,检查超出容差的原因。
3.总结
步进的闭环控制系统,对于某些定位要求比较高的场合具有重要的作用。除了使用编码器反馈组成闭环控制之外,还有可以使用模拟量等方式来构建步进闭环控制系统。具体的实现方式,可以根据工艺和要求来进行选择,此处只是提供了一种应用方案,供参考。
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底