

大家好,我是电子开发网的小林。今天给大家讲一讲丝杠滑台如何回原点,那是不是所有的设备开机过后都要先回一次原点呢?在讲这个问题之前我们需要知道什么叫增量伺服,什么叫绝对伺服。简单通俗的讲,增量伺服做的设备开机后都要先回原点,而绝对伺服则不用每次都回原点,以三菱的FX3U为例,FX3U利用DABS指令可以读取伺服内部保存的当前位置。所以断电再开机过后也不需要回原点,除非伺服驱动器上的电池没电了。
那增量伺服怎么回原点呢?
三菱给出了两个原点回归指令,ZRN和DSZR。ZRN为原点回归指令,DSZR为带DOG搜索的原点回归指令。

ZRN与DSZR对比
我们先来看ZRN指令。

ZRN指令解读
我们以如下这段小程序为例。

ZRN回原点

机械
当按下M0的时候,Y0控制的伺服开始回原点,方向默认为当前值寄存器减少的方向,也就是图中的左方向。其中X0为原点sensor,工作台先以D800的速度往左移动,当X0感应到工作台时,再以D802继续往左移动,知道X0感应不到工作台时,工作台马上停止。此时当前值寄存器会自动清理,回原点指令执行完成。

ZRN指令执行时序
可能有些朋友已经发现问题所在了,那如果工作台在X0的左边,工作台一开始就往左走,那它岂不是一辈子都找不到X0了,它的命运只有撞机。所以三菱推出了带DOG搜素的原点回归指令。当然,我们也可以不用这个指令,可以自己写程序来规避这种撞机情况,怎么写我们以后再讲。我们来看一下DSZR指令。

DSZR指令解读
我们同样以一段小程序为例。

参数设置

正反转极限设定

DSZR回原点
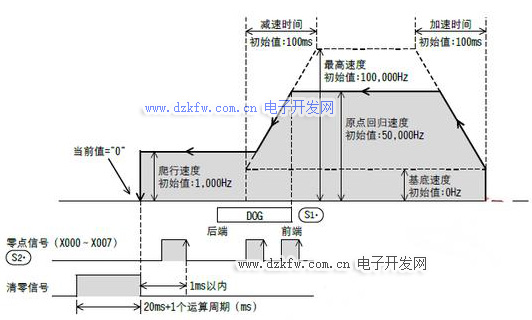
DSZR执行时序图
如果是这个程序不管工作台在哪个位置,都可以安全的回到原点。下图说明了因为机台位置不同指令执行的情况。感兴趣的朋友可以好好理解一下。

本文只是浅析了一下原点回归指令的用法,至于里面的很多特殊寄存器,特殊标志位,因为内容过于庞大,无法一一为大家解析。后面小林会以视频教程的方式为大家讲解三菱 PLC整个运动控制的所有内容。感兴趣的朋友可以关注,转发,评论。关注微信公众号:电子开发网,有机会小林希望可以与你们一起学习讨论。感谢大家的支持。


 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底