
S7-200 PTO向导移植至 S7-200 SMART 运动控制,移植时需要在 S7-200 SMART 中重新运行运动控制向导编程。
S7-200 SMART 运动控制向导的测量系统选择相对脉冲,如图1所示:
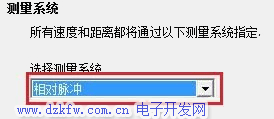
图1. 选择测量系统
S7-200 SMART 运动控制向导的方向控制根据实际情况可以选择“单相(1个输出)”或者“单相(2个输出)”,“单相(2个输出)”有方向控制,如图2所示:
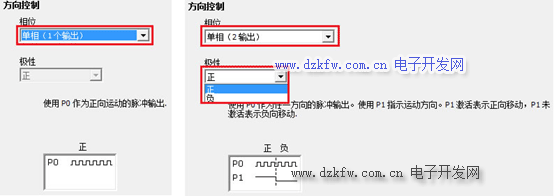
图2. 选择方向控制
CTRL指令移植
PTOx_CTRL指令由AXISx_CTRL 指令替换,如图3所示:
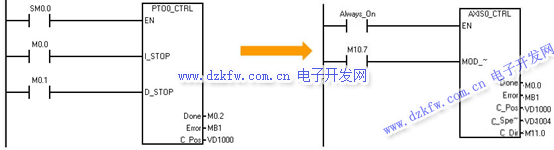
图3. CTRL指令移植
1、 I_STOP参数,在S7-200SMART运动控制向导中根据实际情况启用LMT+(正限位)、LMT-(负限位)、STP(停止点)DI点,选择响应为“立即停止”
如图4所示。如果立即停止为内部变量,可以将该内部变量通过DO点控制DI点实现。
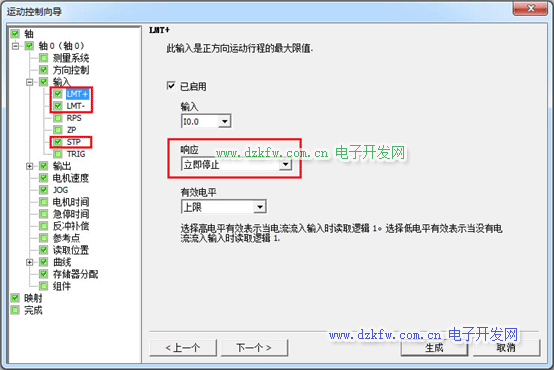
图4. 立即停止
2、 D_STOP参数,在S7-200SMART运动控制向导中根据实际情况启用LMT+(正限位)、LMT-(负限位)、STP(停止点)DI点,选择响应为“减速停止”
如图5所示。如果减速停止为内部变量,可以使用MOD_EN参数替换。
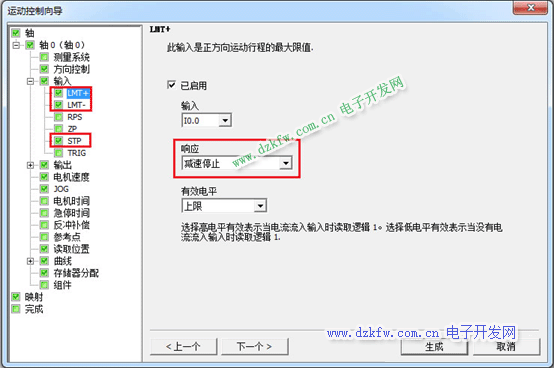
图5. 减速停止
MAN指令移植
PTOx_MAN 指令由 AXISx_MAN 指令替换,如图6所示:
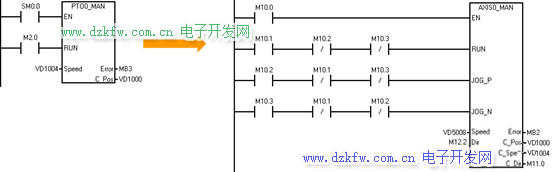
图6. MAN指令移植
1、同一时刻仅能启用RUN、JOG_P或JOG_N中的一个命令;
2、如果改变方向需先改变Dir参数再启用RUN,Dir=0时为正向。
Run指令移植
PTOx_RUN指令由AXISx_RUN指令替换,如图7所示:
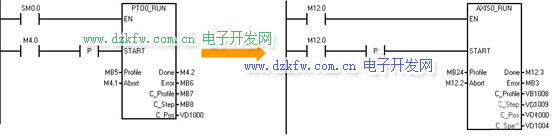
图7. RUN指令移植
1、S7-200最多25个包络,每个包络最多29步,S7-200SMART 最多32个包络,每个包络最多16步;
2、S7-200包络定义为“单速连续旋转”且使用PTOx_ADV指令后继续发送指定脉冲停止功能,在S7-200SMART 可以使用RPS输入点停止,可以通过DO点控制RPS输入点实现,如图8所示:
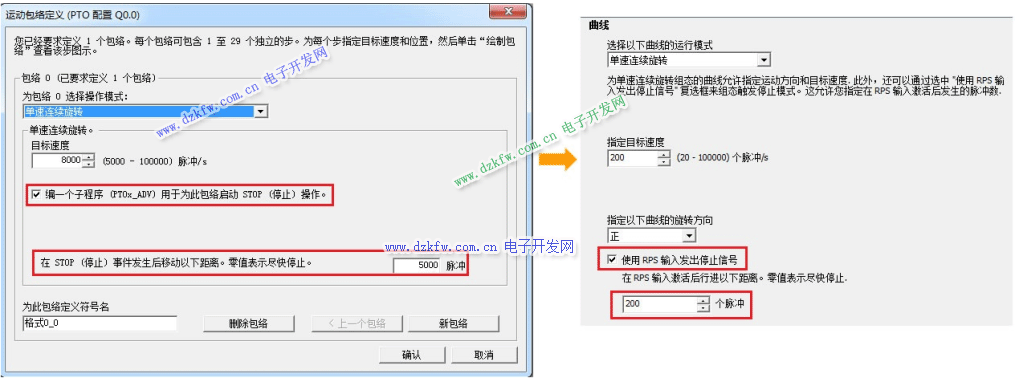
图8. PTOx_ADV 功能移植
LDPOS指令移植
PTOx_LDPOS 指令由 AXISx_LDPOS 指令替换,如图9所示:
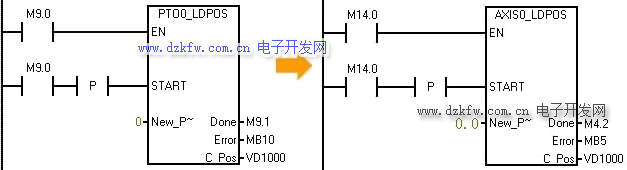
图9.PTOx_LDPOS 指令移植
以上就是运动控制的移植过程!!!
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底