
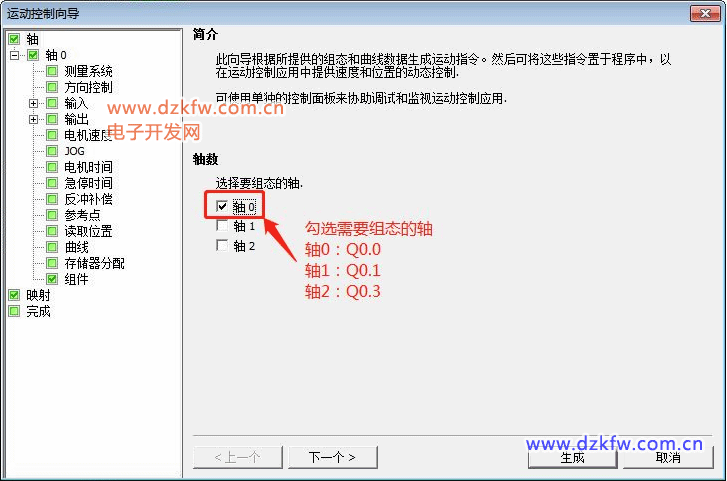
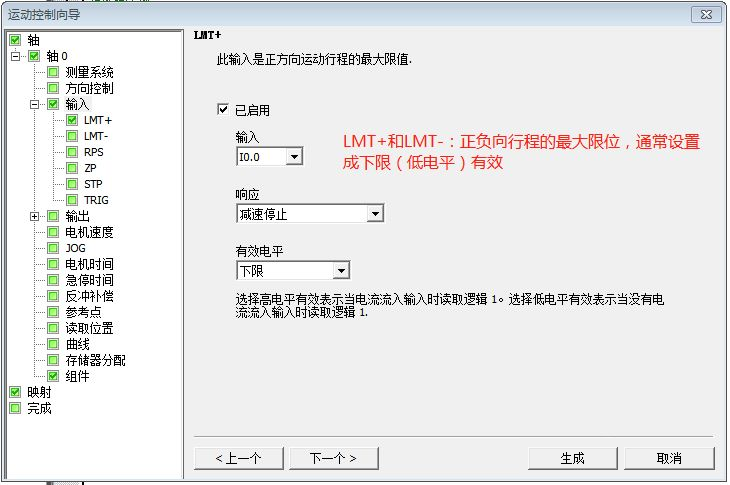
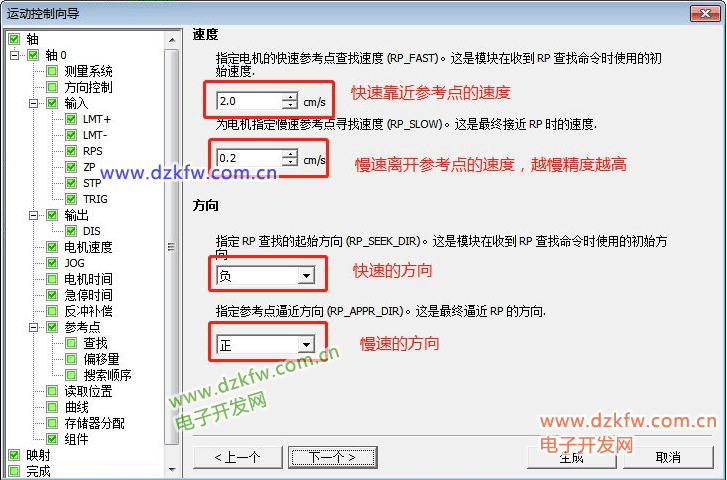
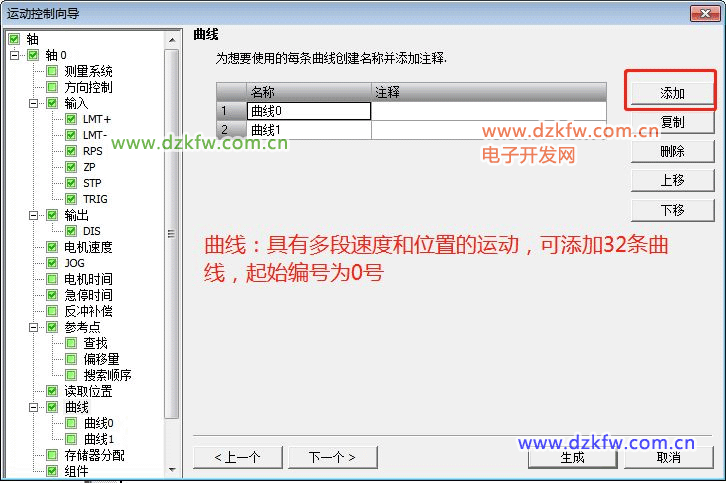
对于S7-200 SMART PLC来说,要做运动控制,我们可以在工具的运动向导里面去进行配置,配置完成后会生成一些子程序,我们就用生成的这些子程序就可以进行编程做运动控制,非常方便。下面就看一下运动向导的配置方法:


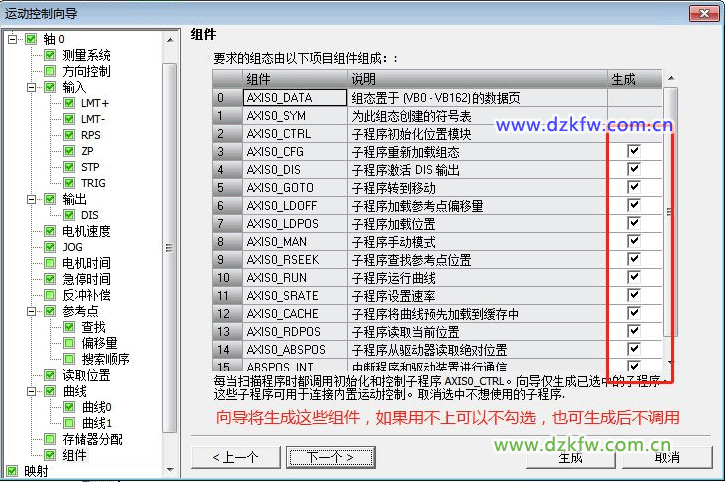

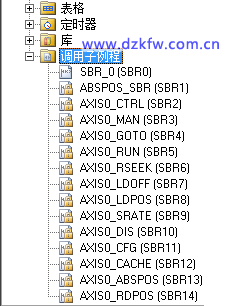
AXIS0_CTRL:运动轴初始化。
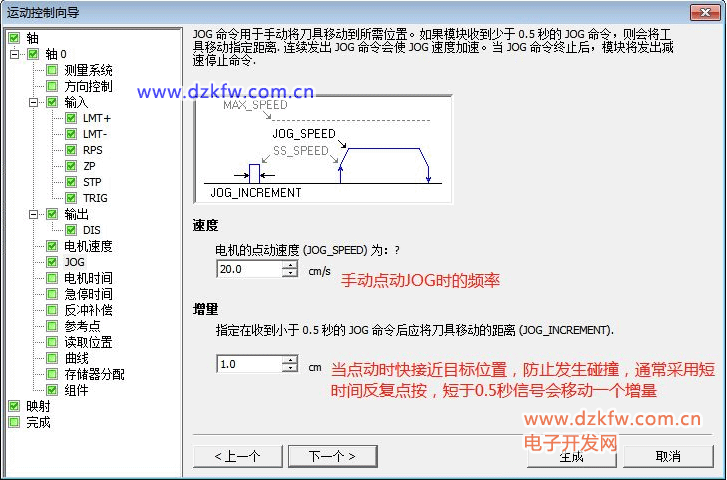
AXIS0_MAN:手动子例程。
AXIS0_GOTO:单段定量子例程。(可设置为相对或绝对)
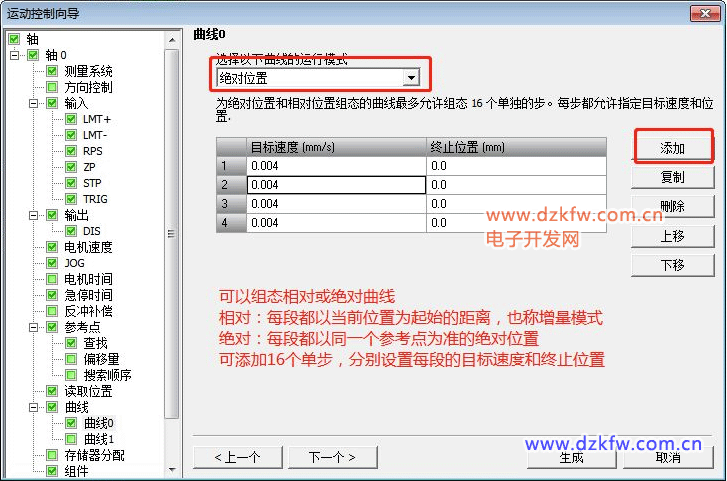
AXIS0_RUN:多段定量曲线子例程。调用向导中组态的曲线运动。
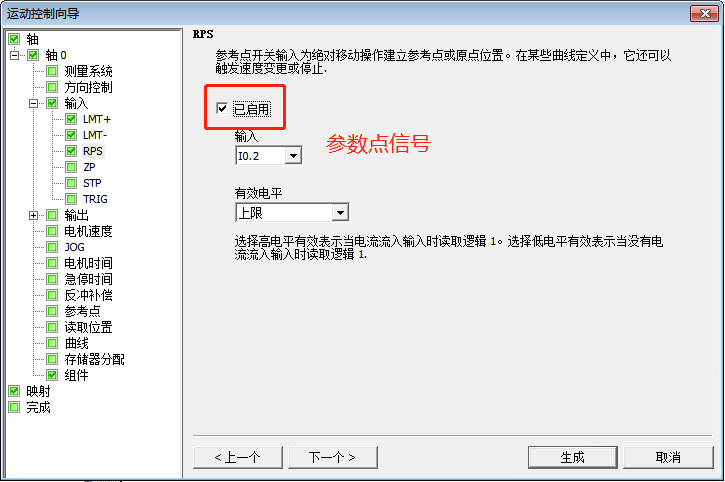
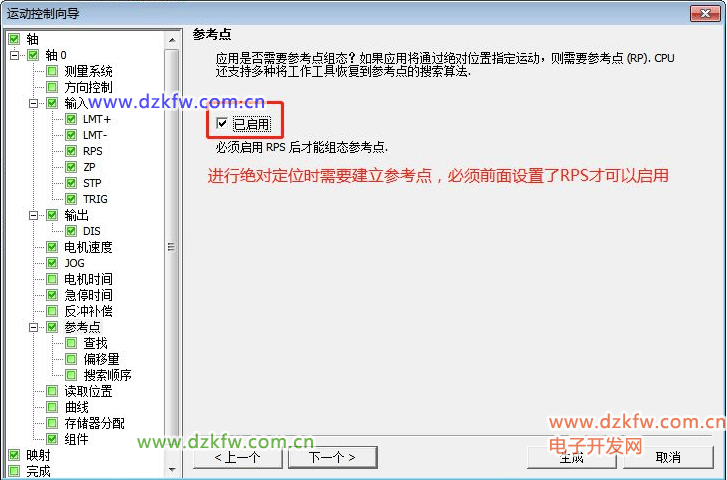
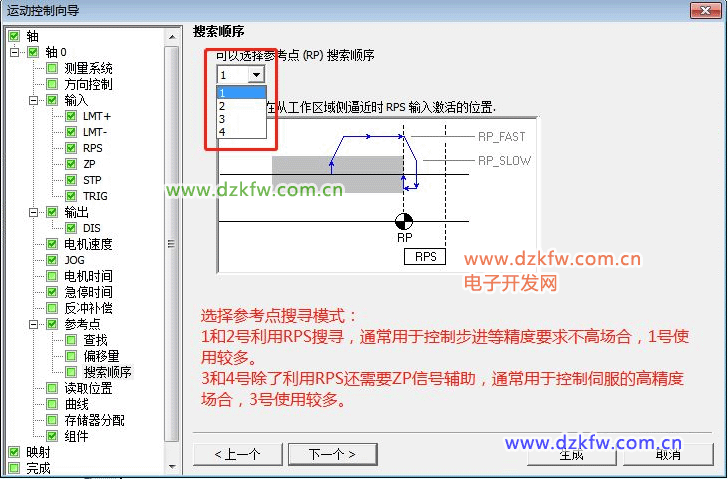
AXIS0_RSEEK:搜寻参考点子例程。按照向导中组态的搜寻速度和搜寻模式搜寻RPS建立参考点。
AXIS0_LDPOS:修改当前位置子例程,可以为运动建立一个虚拟的参考点。
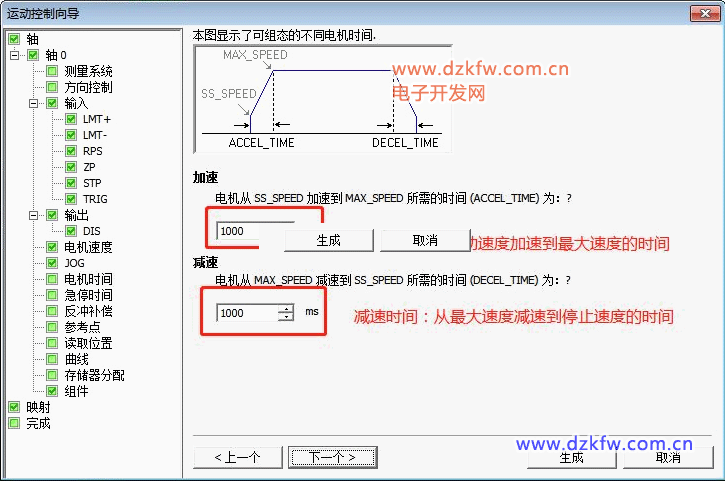
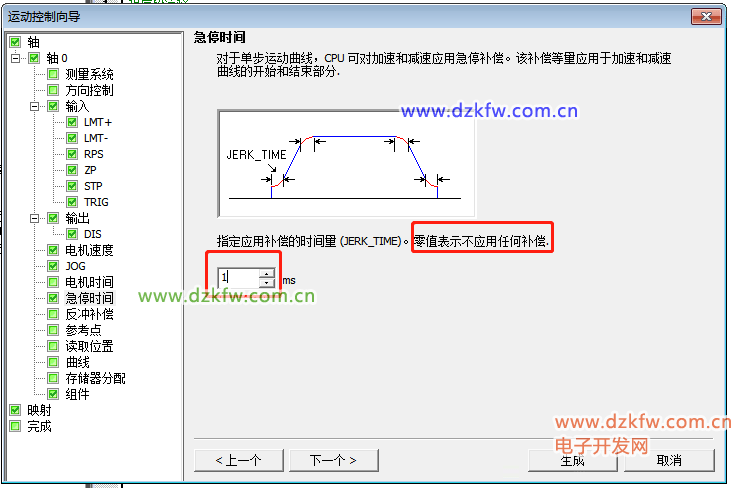
AXIS0_SRATE:修改加减速及急停时间子例程。
AXIS0_CFG:重新加载组态子例程。修改向导数据块中数值后都要用CFG进行刷新才生效。
关于西门子S7-200SMART运动控制向导就完成了!
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底