
伺服驱动器位置(定位)控制方式(四)
有时为了使设备的二(多)条输送线,保持运行同步或比例同步,需要将二(多)台伺服驱动器之间进行电气连接和进行一些参数设置,要如何设计?请看下文:
1、接线图
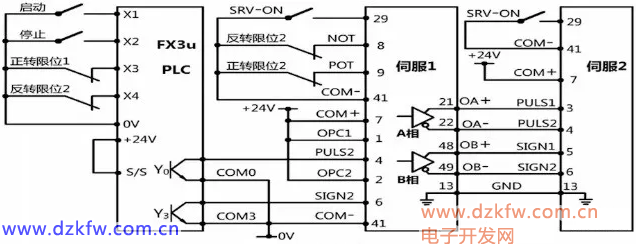
这里用到了主伺服驱动器的分频脉冲输出功能,主伺服驱动器用差分电路输出A/B相脉冲信号,给到副伺服驱动器,副伺服驱动器脉冲信号采用集电极开路方式输入。副伺服驱动器还可以采用高速脉冲输入(差分信号输入)的方式。
2、参数设置
主伺服驱动器参数设置如下:
| 参数名 |
设置值 |
说明 |
| pr0.00 |
1 |
电机旋转方向 |
| pr0.01 | 0 |
位置控制方式 |
| pr0.05 | 0 |
光电耦合输入 |
| pr0.06 | 0 |
脉冲极性设置 |
| pr0.07 | 3 |
脉冲+方向方式 |
| pr0.08 | 0 |
电子齿轮比有效 |
| pr0.09 | 1048576 |
电子齿轮比分子 |
| pr0.10 | 10000 |
电子齿轮比分母 |
| pr4.00 |
8553090=828282H |
NOT(si1)设置 |
| pr4.01 |
8487297=818181H |
POT(si2)设置 |
| pr5.04 |
0 |
限位开关输入有效 |
| pr0.11 |
10000 |
电机每转输出脉冲数 |
| pr5.03 |
0 |
脉冲输出分频分母 |
| pr0.12 |
0 |
输出正逻辑A先B后 |
pr5.03=0时,主伺服驱动器输出脉冲=编码器反馈脉冲×pr0.11设定值×4/编码器分辨率=主伺服电机转速×pr0.11设定值×4;
pr5.03≠0时,主伺服驱动器输出脉冲=编码器反馈脉冲×pr0.11/pr5.03。
副伺服驱动器的参数设置如下:
|
参数名 |
设置值 |
说明 |
| pr0.00 |
1 |
电机旋转方向 |
| pr0.01 |
0 |
位置控制方式 |
| pr0.05 |
0 | 光电耦合输入 |
| 1 |
差分信号输入 | |
| pr0.06 |
0 | 脉冲极性设置 |
| pr0.07 |
0 | A/B相脉冲输入 |
| pr0.08 |
10000 |
电机每转需要脉冲数 |
这里pr0.08设置为10000,主副伺服电机同步运行。改变pr0.08的值就可以改变副伺服电机的转速,如把10000变为20000,转速降为原来的1/2,即比例同步。
在差分信号输入方式的参数设置中,副伺服电机pr0.08的参数值应为主伺服电机pr0.11的参数值的4倍,这样主副伺服电机才同步转速运行。
3、程序设计
用三菱FX3U PLC 设计程序如下:
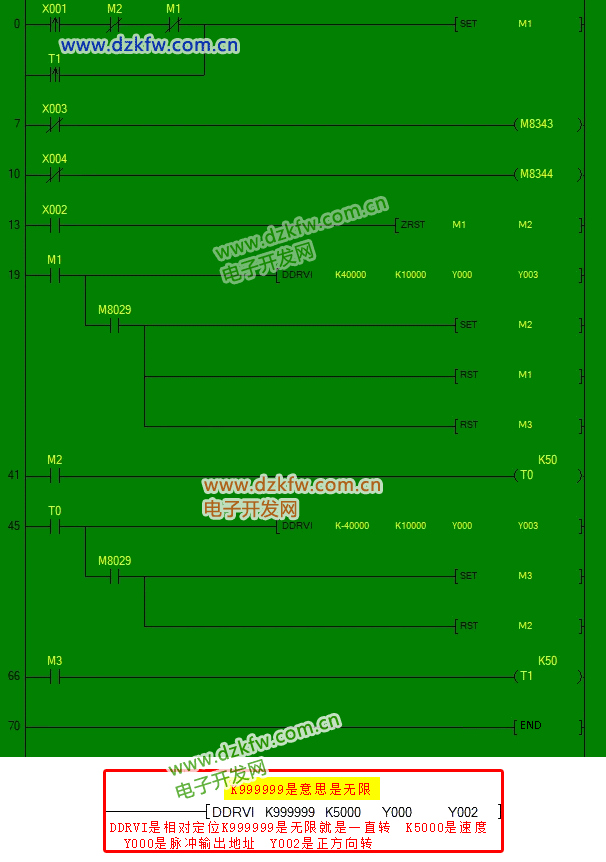
▲ 以60转/分速度正反转行走40mm
M8343\M8344分别是Y0轴对应的正向极限和反向极限。
感谢阅读指正,关注了解更多!
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底