
位置控制模式
在自动控制系统中经常用到几种控制模式分别是位置控制模式、速度控制模式、转矩控制模式、全闭环控制模式。但是比较常用的控制模式还是位置控制模式,说到位置控制模式那么我们就想到了定位控制指令,下面分别对这几个指令讲解一遍。在步进电机和伺服电机控制中,以下这些指令经常用到。
定位指令
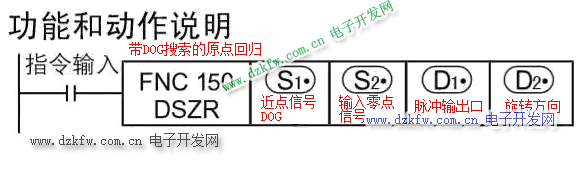
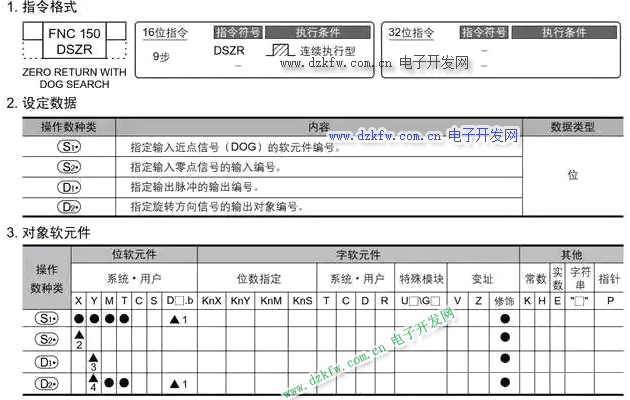
一DSZR / 带DOG搜索的原点回归
概要:
执行原点回归,使机械位置与可编程控制器内的当前值寄存器一致的指令。
DOG搜索功能的对应
允许使用近点DOG和零点信号的原点回归,但是不可以对零点信号计数后决定原点。
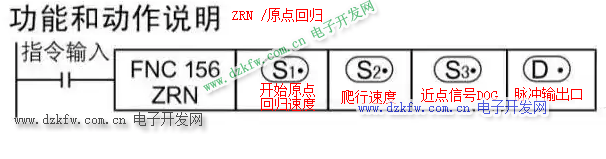
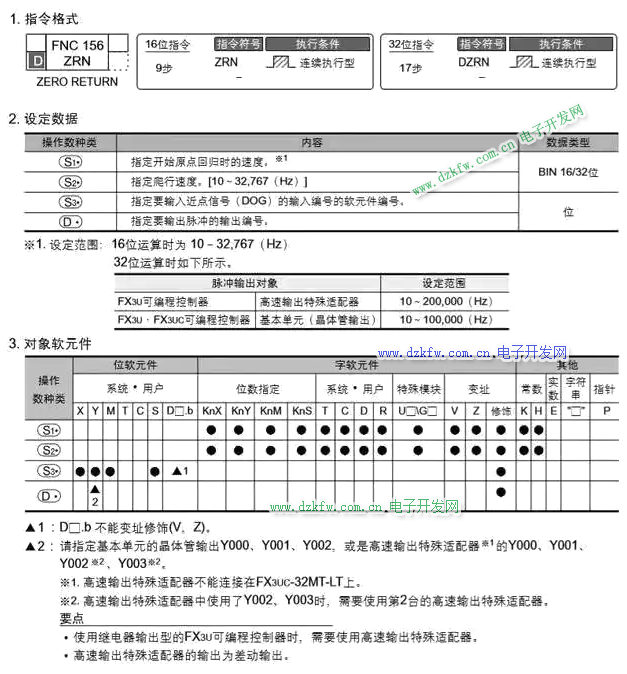
概要:
执行原点回归使机械位置与可编程控制器内的当前寄存器一致的指令
该指令是PLC与伺服驱动器配合工作时,用指定脉冲速度和脉冲输出端口,让执行机构向动作原点(DOG)移动,直到遇到原点信号满足条件为止。
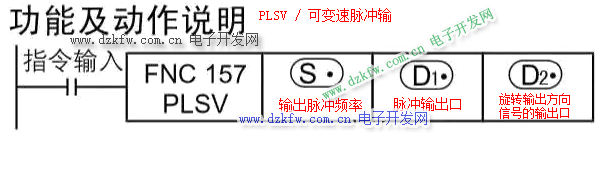
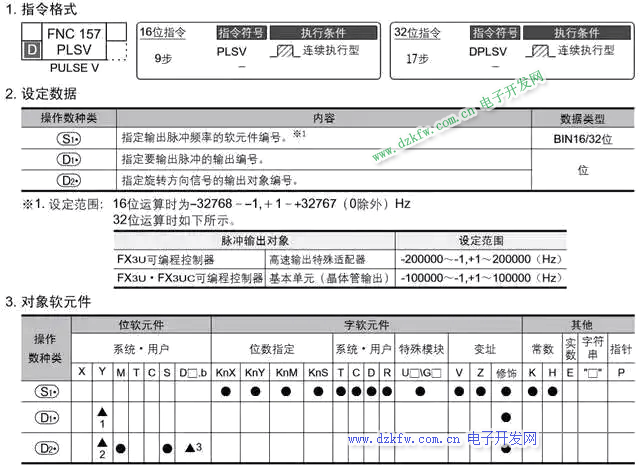
概要:
输出带旋转方向的可变速的脉冲指令
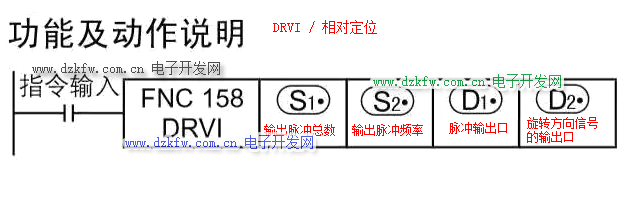
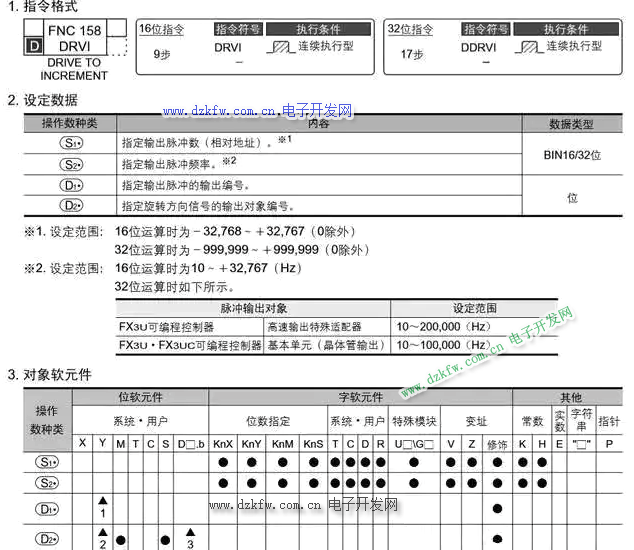
概要:
以相对驱动方式执行单速定位的指令,用带正/负的符号指定从当前位置开始的移动距离的方式,也称为增量(相对)驱动方式
只有晶体管输出PLC才能使用该指令。
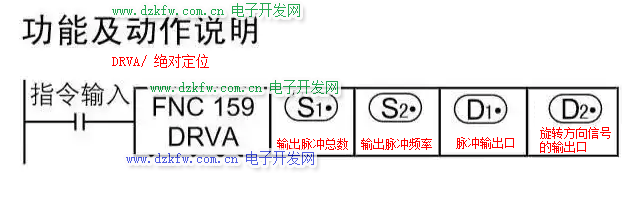
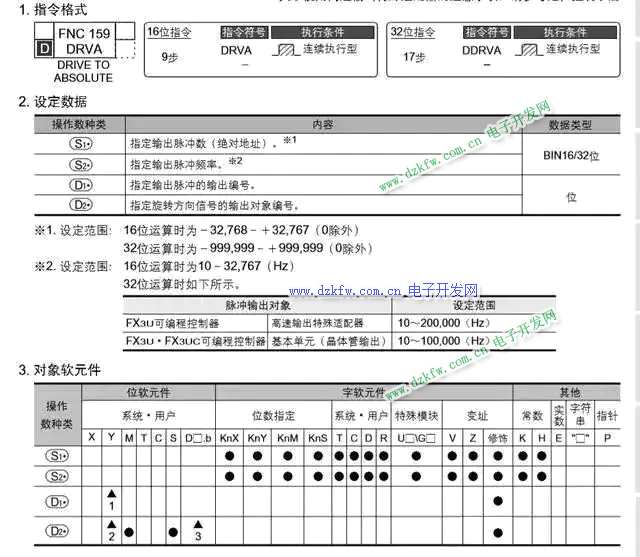
概要:
以绝对驱动方式执行单速定位的指令。该指令是按指定的端口、频率和运行方向输出脉冲,令伺服执行机构运动到指定目的点。只有晶体管输出PLC才能使用该指令。
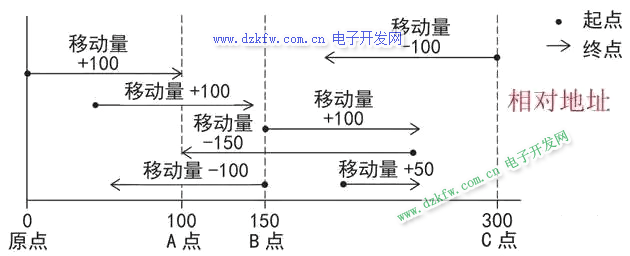
在三菱plc定位功能中,采用目标位置设定方式不同的相对定位(DRVI)指令和绝对定位(DRVA)指令, 进行单速定位。相对定位(DRVI)的目标位置设定方式采用相对地址的位置即增量式,绝对定位(DRVA)的目标位置设定方式采用绝对地址的位置即绝对量式。(听起来很绕口)
首先我们需要了解的是增量式和绝对量.。
所谓的增量式就是以当前停止的位置作为起点,指定移动方向和移动量进行定位,简单来说就是以我现在停的地方作为起点你指定我向哪个方向走多少我就走多少,比如输入500,就向前走500,输入-1000,就往后退1000。
所谓的绝对方式就是以原点为基准指定位置(绝对地址)进行定位,起点在哪里都没有关系,就是说与现在我停在哪地方无关,只与原点做比较,比如我现在在100的位置,我们输入100,是不会动的,输入500,会向前走400,输入-500,会向后退600,因为只和原点做比较,现在在100的位置,输入100与原点比较无变化,输入500,源原点做比较还差400,所以往前走400,输入-500,与原点比较,发现不仅要走100回到原点还要往回再走500加起来就是600。
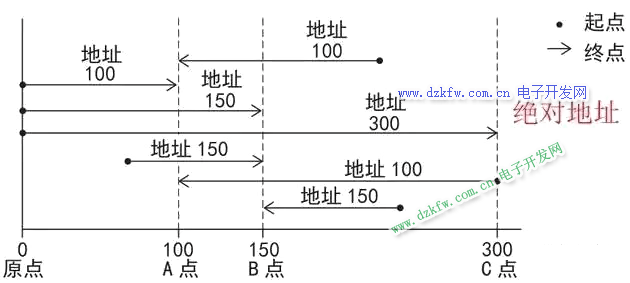
现在明白它们的区别了吗,相对位置是多少就走多少,绝对位置是一个位置数据,它走多少和走的方向要计算现在的位置与绝对位置之间的距离差。通俗的将就是,一个指定距离,一个指定目的。
两个指令都带有加减速时间、基底、最高速度设置,而且都有脉冲发送完成标志位M8029,其他的相关软元件与PLSV类似。
这里主要强调下旋转方向的变换,对于DRVI,当脉冲输出值(相对地址)为正数时正转,脉冲寄存器的脉冲当前值增加,当脉冲输出值为负时反转,脉冲寄存器的脉冲当前值减少,比如设置脉冲输出数为10000,则电机正转,脉冲输出数为-5000时反转。
对于DRVA,它的正反转需要由脉冲输出值(绝对地址)与当前寄存器中的大小做比较,比如当前寄存器为1000,我们设置脉冲输出数为4000,则电机正转,如果设置脉冲输出数为500,则电机反转。
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底