
上几次我们提到了三菱PLC的运动控制指令使用说明,今天来说下这些指令功能的区别以及使用场合。主要有PLSY、PLSR、PLSV、DRVI、DRVA五个指令的不同。
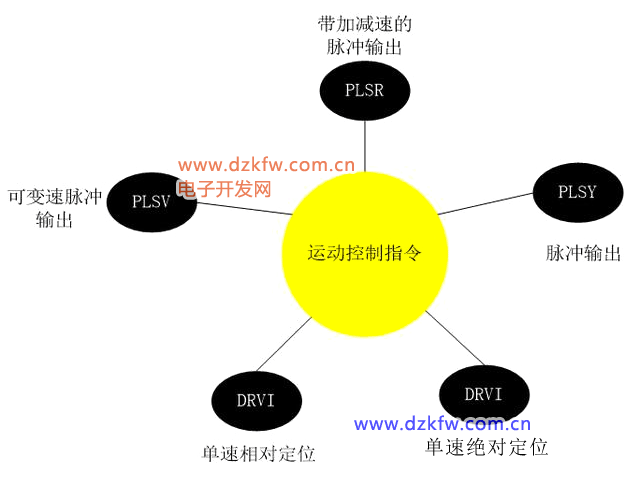
三菱运动控制指令
1PLSY脉冲输出
指令语句 PLSY S1 S2 D1 S1是指定频率,S2是脉冲数量,D1是脉冲输出端口,从这个指令看出没有旋转方向控制或者说方向不能自动识别,在实际运转中需要指令方向,它的脉冲寄存器是累计型的就是说无论正反转脉冲数量都是增的不随着旋转方向的改变进行增减计数,这样就决定了指令中断后没有位置记忆。指令在OFF后再次ON时候从最初的开始,意思就是说我要走2000个脉冲,走到1000突然指令中断,重新ON后,又需要走2000个才停下来。需要注意的是指令执行中修改S1有效,S2无效,需要下次执行有效,指令中断后立即停止脉冲输出没有加减速。可以看出这只是一个简单的定位指令,缺点:
(1)旋转方向不自动识别,需要指定
(2)没有位置记忆功能
(3)没有加减速功能
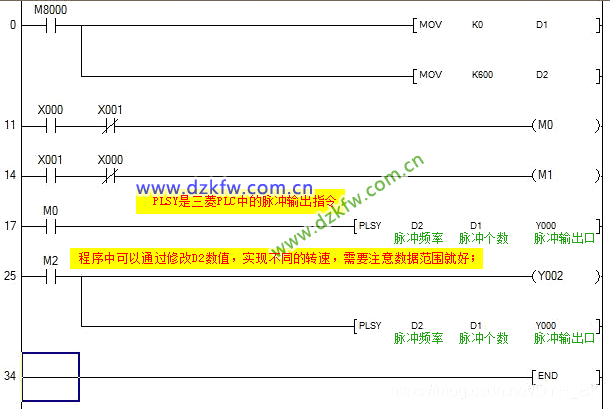
PLSY实例
2、PLSR加减速脉冲输出
指令语句 PLSR S1 S2 S3 D1,相比于PLSY,PLSR指令多了一个加减速时间S3,在输出脉冲时,可以进行加减速脉冲输出,其他都一样。此外数据S1 S2指令运行中修改无效,在下一次的指令驱动时,更改内容有效,
3、PLSV可变速脉冲输出
指令语句PLSV S1 D1 D2,S1是脉冲频率,D1是脉冲输出端,D2是旋转方向输出,从指令看出它的旋转方向不需要指定,能够自动输出旋转方向,没有指定的定位功能,但可以从脉冲寄存器获得位置信息,注意:a.S1的值可设置为负 b.指令运行中可改变S1频率的值(特别注意在换符号时需要先将S1设为0再修改,比如频率有+200改为-500,必须要先将值有200设置为0再由0改为-500),c.脉冲寄存器的增减计数由S1的符号决定,同样旋转方向也是,d.可通过置位特殊辅助继电器M8338激活加减速功能,加减速通过特殊数据寄存器设置完成,在遇到指令断开、正反转极限标志减速停止。
相比于PLSY、PLSR而言,PLSV带有加减速功能,旋转方向可控,具有位置记忆,在定位需要计算目标位置的距离与方向。
4、DRVI相对单速定位
指令语句DRVI S1 S2 D1 D2,S1是输出脉冲(相对位置),S2是脉冲频率,D1脉冲输出端口,D2是旋转方向输出,从这条指令看出,能够定位,方向不要指定能自动输出旋转方向。它能够输出指定的脉冲,脉冲可以是正的也可以是负的,脉冲数为正正传D2是ON状态,脉冲寄存器增计数,脉冲数为负反转,减计数,D2是OFF状态。同样具有加减速功能。
在这里要明白相对位置与绝对位置的区别,简单说相对位置说的是过程,绝对位置指的是目的,比如:
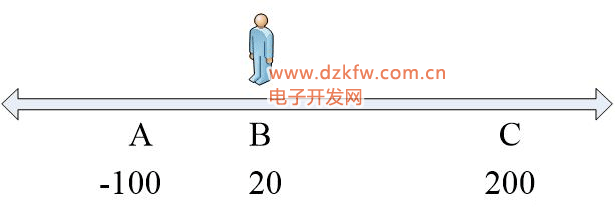
位置
假设1现在处于B地点坐标是20,现在往A地点(-100)的位置走:
采用相对位置,你需要计算AB的间距-120,则S1脉冲输出-120
采用绝对位置,你只需要输入A的坐标-100,则S1脉冲输出-100
2假设从B到C地点:
采用相对位置,你需要计算AB的间距180,则S1脉冲输出180
采用绝对位置,你只需要输入A的坐标200,则S1脉冲输出200.
5、DRVA绝对单速定位
指令语句DRVAS1 S2 D1 D2,基本与DRVI差不多,区别有两点:
1就是S1采用绝对位置定位
2,旋转方向的输出与脉冲寄存器的增减计数,采用目标位置与当前位置的的差值决定,差值为正,正转寄存器增计数,差值为负反转,寄存器减计数。
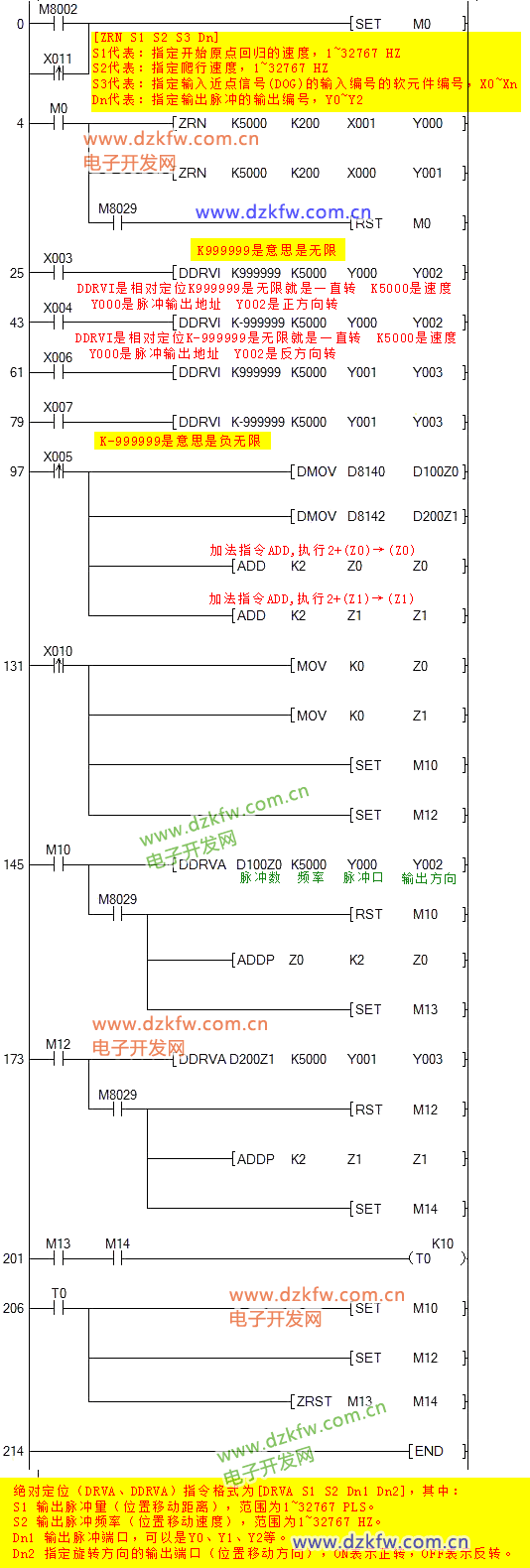
三菱plc驱动伺服电机控制示例
6、总结
运动控制指令大致分为调速、定位分类,只不过侧重点不一样,PLSY、PLSV能实现指令运行中变速,PLSR只能实现运行加减速(启动加速、减速停止),PLSV、DRVI、DRVA可实现任意减速停止。PLSY、DRVI、DRVA具有内置定位功能,但PLSY没有位置记忆功能,PLSV的定位功能需要根据脉冲寄存器实现定位。
总的来说,如果运动中变速要求高选用PLSY、PLSV指令,
如果要求定位要求较高且运动频繁则需要选用DRVI与DRVA指令。
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底