
步进电机和伺服电机,不同于三相异步电机,它们的主要作用是用作定位。也就是精确的确定工件的位置。步进电机 和伺服电机的选型,必须有电气人员和结构人员以及工艺人员共同确定。由于伺服电机比步进电机价格、性能都要高,因此,必须根据实际的机械结构,工艺数据以及控制系统,选择性价比最高的方案。也就是,在满足需求的前提下,在保证可靠的情况下,降低成本。
-
1、根据轴数确定
这是选择步进还是伺服的最基本原则,也是最容易被忽略的。对于伺服来说,由脉冲和通信两种控制方式,而步进只有脉冲控制方式。因此,当控制轴数很多时,尽量选择伺服,采用通信控制,这样,无论是前期施工,还是后期维护都非常方便。一般四轴,最多六轴以内,都采用脉冲控制。而且现在PLC基本都标配四轴高速输出,比如三菱FX5U,西门子S7-1200,欧姆龙CP1H等等。

-
2、根据节拍确定
该因素是关键,由于伺服和步进的自身特点,导致它们在应用上的差异。步进的加速时间在0.3到0.5秒之间,而伺服的加速时间只有几毫秒。这些时间差异对于人类来说,几乎没区别,但对自动化设备来说确实至关重要。它对设备的整体节拍,有着至关重要的影响。小功率的日系伺服,额定转速3000r/min,中大功率的伺服,额定转速在1500到2000r/min。而极小惯量的欧系伺服,其额定转速可以到达5000r/min,甚至9000r/min。而步进一般在500r/min左右。再加上机械结构的影响,所以,选择步进还是伺服,直接决定了设备的节拍。
-
3、根据控制精度确定
步进电机的步距角是重要的因素,它直接决定了步进电机的精度。比如步距角0.18度的步进电机,给定一个脉冲,它就前进0.18度。这就是它所能达到的最低精度。因为不可能有半个脉冲。但是,步进都支持细分,采用各种算法,让它的精度编程0.018度或是其它数值,但是不能无限制细分。而伺服电机的精度,是由它的编码器决定的。比如,现在主流的日系伺服,其编码器是21位,甚至22位。21位,也就是编码器的精度2^21,把360度等分成2097152份,精度已经相当高了。这些,仅仅是电机能达到的精度,还要考虑机械的精度,比如减速机的反向间隙,丝杠的安装和加工精度等等。一般说来,无论是步进还是伺服,都能实现0.1毫米的实际精度。

-
4、根据使用场合确定
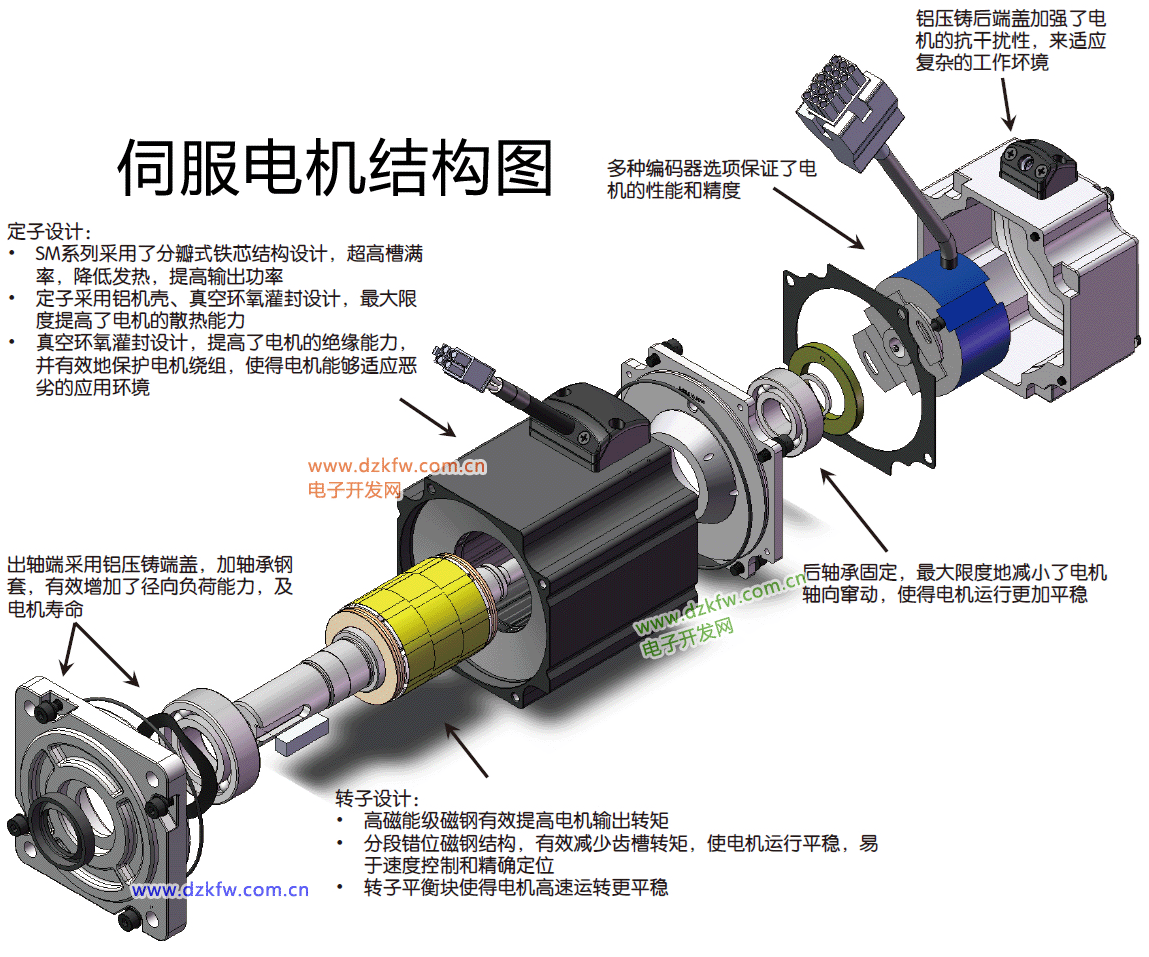
主要是在一些特殊场合,由于步进电机可以做的更小,在一些空间狭窄的场合,需要使用步进电机。伺服电机最小的为200W,个别品牌有100W的产品,虽然体积比较小,但是在相同扭矩输出下,步进电机可以做的更小。由于步进和伺服的差异,一般说来,伺服电机输出端都是增加减速机构,而步进电机一般是直接输出。
-
5、根据预算
相对于伺服电机来说,步进电机价格低廉,因此在满足需求的前提下,应该尽可能使用步进。当然,如果一味追求价格,而忽视需求,那么,选用步进节省的成本,还不够现场出问题的各种费用。
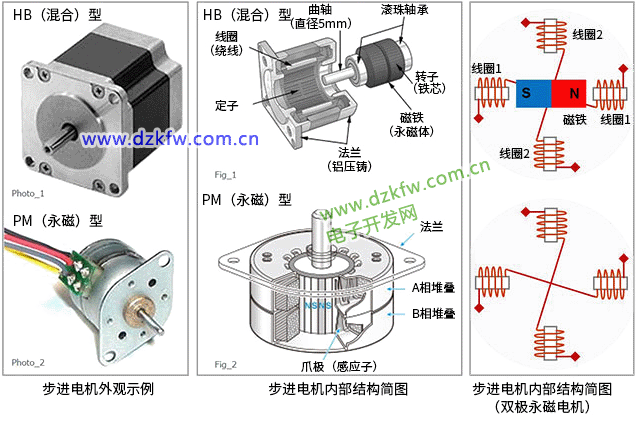
步进电机知识扩展:步进电机的相数:是指电机内部的线圈组数,目前常用的有二相、三相、四相、五相步进电机。电机相数不同,其步距角也不同,一般二相电机的步距角为0.9°/1.8°、三相的为0.75°/1.5°、五相的为0.36°/0.72° 。
保持转矩:是指步进电机通电但没有转动时,定子锁住转子的力矩。它是步进电机最重要的参数之一,通常步进电机在低速时的力矩接近保持转矩。
相数:产生不同对极N、S磁场的激磁线圈对数,是指电机内部的线圈组数,目前常用的有二相、三相、四相、五相步进电机。电机相数不同,其步距角也不同,一般二相电机的步距角为0.9°/1.8°、三相的为0.75°/1.5°、五相的为0.36°/0.72° 。在没有细分驱动器时,用户主要靠选择不同相数的步进电机来满足自己步距角的要求。如果使用细分驱动器,则‘相数’将变得没有意义,用户只需在驱动器上改变细分数,就可以改变步距角。目前应用最广泛的是两相和四相,四相电机一般用作两相,五相的成本较高。
拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即 A-AB-B-BC-C-CD-D-DA-A.
固有步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。θ=360度(转子齿数J*运行拍数),以常规二、四相,转子齿为50齿电机为例。四拍运行时步距角为θ=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半步)。这个步距角可以称之为‘电机固有步距角’,它不一定是电机实际工作时的真正步距角,真正的步距角和驱动器有关。
定位转矩(DETENT TORQUE):电机在不通电状态下,电机转子自身的锁定力矩(由磁场齿形的谐波以及机械误差造成的),DETENT TORQUE 在国内没有统一的翻译方式,容易使大家产生误解;由于反应式步进电机的转子不是永磁材料,所以它没有DETENT TORQUE。
最大静转矩:也叫保持转矩(HOLDING TORQUE),电机在额定静态电作用下(通电),电机不作旋转运动时,电机转轴的锁定力矩,即定子锁住转子的力矩。此力矩是衡量电机体积(几何尺寸)的标准,与驱动电压及驱动电源等无关。通常步进电机在低速时的力矩接近保持转矩。由于步进电机的输出力矩随速度的增大而不断衰减,输出功率也随速度的增大而变化,所以保持转矩就成为了衡量步进电机最重要的参数之一。比如,当人们说2N.m的步进电机,在没有特殊说明的情况下是指保持转矩为2N.m的步进电机。
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底