
因为PI系统中的I的存在会使整个控制系统的响应速度受到影响,为了解决这个问题,我们在控制中增加了D微分项,微分项主要用来解决系统的响应速度问题,其完整的公式如下:
u(t) = Kp*e(t) + Ki∑e(t) + Kd[e(t) – e(t-1)]+u0
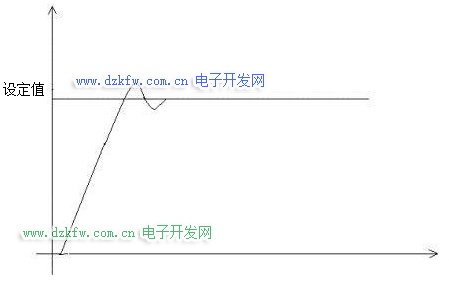
在模拟电路中的微分常数是与特征频率相关系的,而在数字离散PID中的微分项实际上是有一些问题的,因为其只计算了两次误差的差值,而实际的模拟PID或者用户需要的理想微分公式应该是要对其进行展宽的,只有展宽的D值才能真正的起到很好的效果。微分项在控制系统中起到减少超调降低振荡的作用,但因为微分项本身对于干扰很敏感,所以在使用微分项时要慎重。
在PID的调试过程中,我们应注意以下步骤:
1、 关闭I和D,加大P,使其产生振荡;
2、 减小P,找到临界振荡点;
3、 加大I,使其达到目标值;
4、 重新上电看超调、振荡和稳定时间是否吻合要求;
5、 针对超调和振荡的情况适当的增加一些微分项;
6、 注意所有调试均应在最大争载的情况下调试,这样才能保证调试完的结果可以在全工作范围内均有效;
位置PID与增量PID:
前面我们所说的PID公式均是位置PID,也称为全量PID,这在温控、阀门控制、水泵控制中最常用到,另一种PID公式称之为增量PID其公式如下:
△u(t) = u(t) – u(t-1)
这在运动控制中最常使用,其输出是两次PID运算结果的差值,一般的步进或者伺服电机的位置控制可以采用这种方式。
二十一、运动控制
运动控制是近些年的热门,精密定位、恒速控制、恒力矩控制等在各种装备中的应用越来越广泛,这对于控制器的要求也越来越高。
对于运动控制,大家比较常用的包括步进电机、伺服电机,除此之外伺服阀、数字液压等都属于同一类的控制方式。在这些运控系统中,我们又根据控制对象的不同分为位置控制、速度控制、力矩控制三大类。其中步进电机只能应用于位置控制,而伺服则可以应用于这三类中的任一种控制方式。
在运动控制系统中我们一般可以使用专用的运动控制器或者PLC来实现运动控制功能,一般来说专用的运动控制器如数控系统等会更为专业功能更强,对于插补、G指令的支持会更好。
比方说高档的数控系统可能会支持以下的功能:用户用CAD画完图后转换成G代码下载给控制器,控制器就可以执行对应的G代码完成整个控制过程。
而PLC相对而言是一个更为通用的控制平台,一般通过功能块来实现运动控制功能,V80增强系列(/S)对于两轴的位置控制有很强的支撑,可以满足绝大多数运动控制要求的环境,V80的速度控制和力矩控制一般使用E6MAD扩展模块来实现,在这里我们提到的运动控制是CPU模块本身的位置控制功能。
21.1、位置控制基础
在装备控制中有相当多的场合需要用到位置定位控制,如各种机床、收卷排线、纸张电缆管材的定长裁剪、包装、印刷等。位置控制的实现,通常是通过步进电机和伺服电机来达到的,下面我们统一以步进电机来描述。
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
PLC正是利用步进电机的这种特性来实现位置控制功能的,PLC与步进电机之间的接口为脉冲接口,我们称之为PTO。
脉冲与位置的关系:
比方说我们需要步进电机转动90度,而步进电机的步距角为0.3度的,那么我们的脉冲输出个数就应该为300个,当300个脉冲输出完毕后电机正好旋转90度停止。
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底