
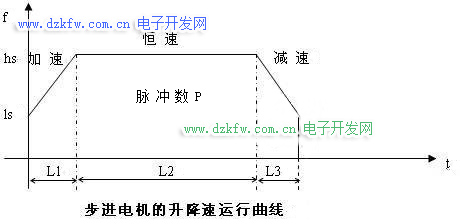
实际的应用中我们需要考虑到步进电机在带载的情况下无法高速启动,所以需要步进电机在启动时使用较低的脉冲频率,然后逐步提升速度,否则会有失步和过冲的现象出现。同时一般的步进电机使用场合都是开环的,一旦出现了失步和过冲则是不可恢复的误差。(伺服电机这种情况要好一些但在负载太大的情况下仍然会有启动不了的现象)
为了防止出现失步和过冲的情况,我们通常会让步进电机在低速启动后再逐步提升速度,在加速过程中,最好的是S型加速,S型加速的加速度是线性的,这对于机械和电机来说是最吻合其特性的。在实际的应用中,大多数是采用的线性加减速,这对于大多数的应用来说也是足够了的。
步进电机的正反转:
运控系统中的正反转是很常用的方式,由于步进电机没有带反馈装置,所以步进电机不适合高速的正反转,一般而言,在空载的情况下行程在100个脉冲往反转,步进电机的正反转频率只能达到10次/秒以下(大多数的在5次/秒以下),伺服电机的正反转频率可以达到50次/秒以下(刚性要调得比较高)。不同厂商的电机不同,主要与惯量的大小有关系。
正反转时,需要很好的加减速控制的支持,否则会出现失步和过冲的情况,伺服系统还会出现还没到位就开始反转的情况。
在实际的应用之中我们还常用接近开关、光电开关、编码器、光栅尺来与步进电机配合完成位置控制。这些方法中可以分为两大类一类是开关型定位,一类是坐标定位。
开关型定位:
包括接近开关、光电开关、接触开关等,这些开关最常用的是安置在原点,用来标零和消除累积误差。这些系统在上电后一般都有找原点的动作过程,通常都是上电后向一个方向运动找到原点后标定原点坐标,然后开始正常工作。
坐标定位:
这一类的控制采用编码器、光栅尺、电子尺(模拟电压接口)之类的,其中又分为绝对编码和相对编码两类,顾名思义绝对编码的输出信号是绝对坐标,通常是并行的总线,而相对编码的输出信号只是串行的脉冲信号,因为绝对编码器比较贵,所以大多数的现场都使用相对编码。
相对编码的信号有AB相、方向脉冲、上下脉冲三大类

AB相又分为*1、*2、*4三种细分方式,*1,表示AB相各来一个脉冲计数值加或减1,*2表示AB相的任一上升沿加或减1,*4表示AB相的任一脉冲的上升沿或者下降沿均加或减1。V80的AB相脉冲计数方式只支持*4的细分方式。
大多数的编码器均是AB相的信号,或者是ABZ信号,ABZ信号相对于AB相信号多了一个Z信号线,用来标示编码器的零点,编码器每转一圈出一个脉冲。
电子尺:
电子尺多用在各种距离计量的装备上面,比方说注塑机的射胶电子尺、合模电子尺等。电子尺可采用脉冲接口或者模拟量接口(电位器),PLC需要通过模拟量输入模块来采样,但是大多数PLC的模拟量输入模块的响应速度太慢无法满足现场的要求(通常的采样周期在100mS左右)。V80的高速模拟量扩展模块E6MAD可以达到mS的采样周期,所以可以用来实现高速的模拟量电子尺接口。
基本上大多数运动控制都可以由上面的功能组合而成,对这些概念有一个基本的认识是正确使用运动控制功能的前提。
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底