
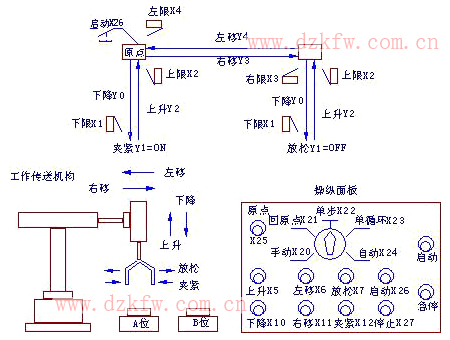
图1 所示为用机械手移送工件的机械系统。左上为原点,工件按下降→夹紧→ 1 工件移送系统示意图
上升→右移→下降→松开→上升→左移的次序依次运行。 下降 / 上升,左移 / 右移中使用双线圈的电磁阀。夹紧使用的是单线圈电磁阀。

该系统的初始化电路状态转移图如图 2 所示
图3为自动运行的状态转移图,图中 S2 为自动方式的初始状态。

图3 机械手控制系统的程序
图1 所示为用机械手移送工件的机械系统。左上为原点,工件按下降→夹紧→ 1 工件移送系统示意图
上升→右移→下降→松开→上升→左移的次序依次运行。 下降 / 上升,左移 / 右移中使用双线圈的电磁阀。夹紧使用的是单线圈电磁阀。
该系统的初始化电路状态转移图如图 2 所示
图3为自动运行的状态转移图,图中 S2 为自动方式的初始状态。
图3 机械手控制系统的程序
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底