
1. 新功能解读
S7-200 SMART CPU自面世以来,凭借其优秀的性能受到了用户的广泛好评。2022年9月6日,V2.7固件正式发布,下面为大家介绍一下新版本有什么特点,增加了哪些新功能。
1.1 超驰功能
概念:超驰是指运动控制指令之间相互覆盖的情况,用户可以用新的指令覆盖正在执行的命令,超驰功能一旦激活将会中止当前动作并立即执行新的命令。
优点:轴不用停止,可以平滑过渡到新的指令或是同一指令的新参数。
功能说明:S7-200 SMART V2.7目前仅支持在相同指令间触发超驰响应。支持两种指令:一种是通过运动控制向导方式生成的AXISx_GOTO指令,另外一种是通过PLS指令。
AXISx_GOTO指令
・ 支持的运动模式:
对于AXISx_GOTO指令,仅在绝对运动模式和相对运动模式支持超驰功能,
两种运动模式之间可以相互触发超驰响应,同一个模式的指令也可以先后激活以触发超驰响应。
・ 触发超驰的方式:
正在执行的AXISx_GOTO指令再次通过START管脚上升沿被激活;
正在执行AXISx_GOTO指令时,激活另一个AXISx_GOTO指令。
・ 可调整的参数:
超驰功能可用于更改正在运行的AXISx_GOTO指令的速度、位置和运动模式,(仅支持模式0 和模式1)。
・ 超驰触发后的过程:
如果速度已更改,CPU 将加速或减速,以达到新的目标速度;
如果运动方向改变,CPU 将减速至停止,然后再沿更改的方向运动;
超驰中的无效组态,将打断当前的运动(比如新的AXISx_GOTO指令为绝对运动模式, 但触发指令之前未建立参考点)。
PLS 指令
・ 支持的模式:
PLS指令中仅PTO单段模式支持超驰响应。
・ 触发超驰的方式:
PTO控制字节(SMB67、SMB77 和SMB567) 中使能超驰响应,通过上升沿重新激活正在运行的 PLS 指令。
通过在PTO 控制字节 (SMB67、SMB77 和SMB567) 中使能超驰响应,激活另一个 PLS 指令。
・ 可调整的参数:
超驰功能可用于更改正在运行的 PLS 指令的频率和脉冲计数。
1.2 运动轴组
V2.7之前固件版本的S7-200SMART仅支持单轴的运动,对于多轴之间的协调联动需要编程实现。例如需要将木材加工成复杂的多边形,就需要三轴配合完成。
STEP 7‑Micro/WIN SMART V2.7 软件配合S7-200 SMART V2.7 CPU 固件支持基于PTO(脉冲串输出)开环的2D/3D直线插补运动功能。
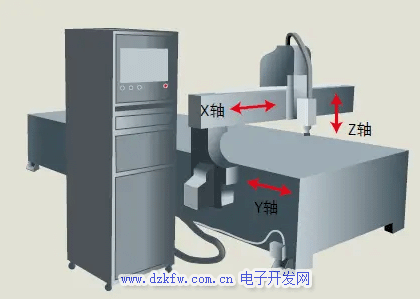
图1 木工机械装置
功能说明:通过运动控制向导轴组功能,实现2轴或者3轴的直线插补运动。轴组由轴组成,轴组和轴的关系是静态的,不支持动态配置。
实现方式:在运动控制向导中配置轴组后,有两种方式可以对轴组进行操作。
第一种是配置轴组后,不对轴组进行路径规划。第二种是配置轴组后,对轴组进行路径规划。
目前只有一个轴组可以使用,轴组的X 轴对应轴0,轴组的Y 轴对应轴1,轴组的Z 轴(如果适用)对应轴2。
・ 配置轴组后,不对轴组进行路径规划
使用运动向导组态轴组,自动生成的GRP0_2/3D_MOVELINEAR指令,该指令控制轴组实现从实际位置到目标位置的 2D/3D 直线插补运动。
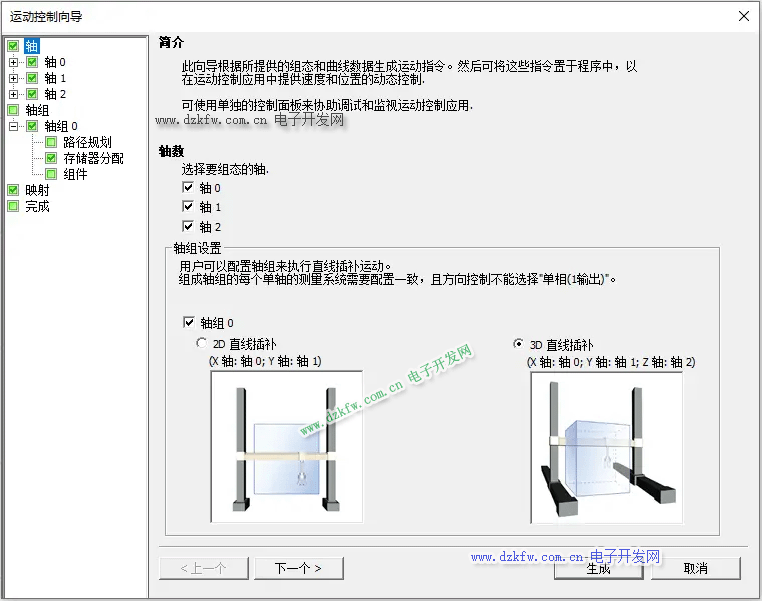
图2 配置轴组
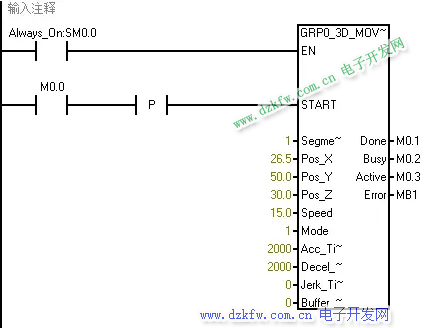
图3 GRP0_2/3D_MOVELINEAR指令
・ 配置轴组后,对轴组进行路径规划
使用运动向导组态轴组,并在向导中对轴组的运动路径进行规划,使用向导生成的GRP0_MOVEPATH指令触发向导中规划的路径。轴组的路径规划功能可配置的路径最多为128条,轴组路径规划功能仅适用于绝对运动模式。
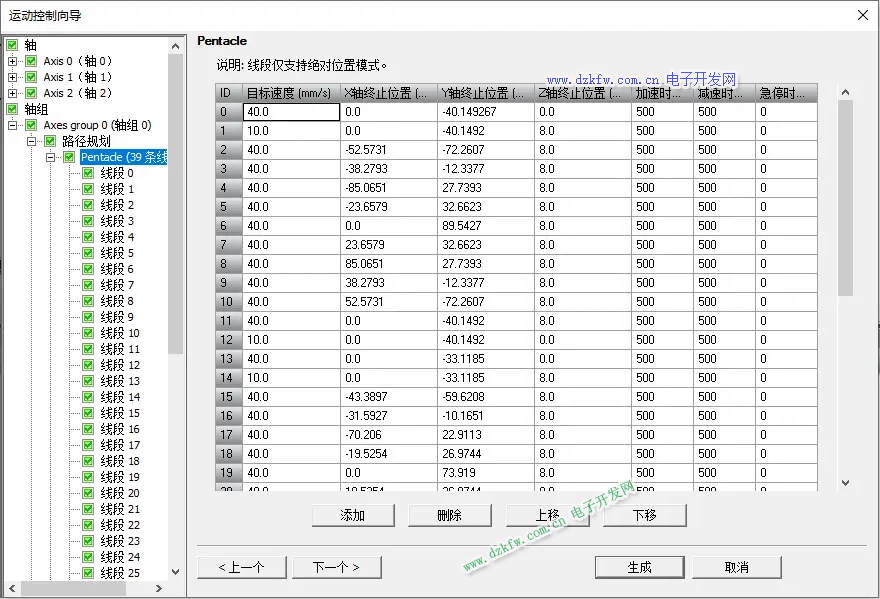
图4 对轴组进行路径规划
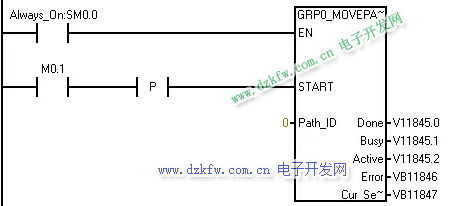
图5 GRP0_MOVEPATH指令
1.3 用户自定义Web界面
功能说明:STEP 7‑Micro/WIN SMART V2.7软件配合S7-200 SMART V2.7 CPU 固件增加了Web 服务器用户自定义Web页面功能。利用 SMART Web Editor工具,用户可创建自定义Web页面项目,并将该项目下载到 CPU当中。

图6 SMART Web Editor 组态界面
优点:通过SMART Web Editor 组态工具,可以快速的开发基于Web的人机界面,按钮、仪表盘、趋势图等控件可以满足基本的使用要求,大大的缩短产品开发周期。
1.4 Web API(应用程序编程接口)
功能说明:STEP 7‑Micro/WIN SMART V2.7软件配合S7-200 SMART V2.7 CPU固件增加了Web API功能,为用户提供了从终端设备读取和写入 CPU数据的接口。简单的说,就是不使用SMART Web Editor组态工具,自行开发网页或者应用程序,利用Web API访问CPU数据。
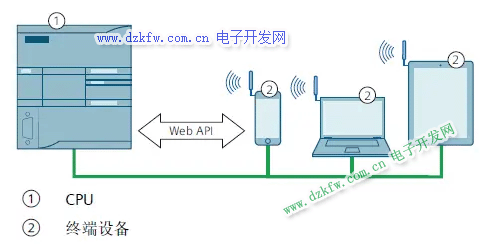
图7 CPU 通过以太网端口支持 Web API功能
2 产品订货信息
以上内容就是本次S7-200 SMART V2.7 CPU固件新增功能的大致描述,对于V2.6固件的CPU若是需要使用以上功能,需要将固件升级到V2.7版本。
表格1 V2.7 固件对应的 CPU 型号

说明:
-
固件版本为 V2.7 的 CPU 型号不能降级到 V2.6 或任何以前的版本。
-
先前订货号以 0AA0 结尾的任何 SR 或 ST 型号都不能升级到 V2.7。
-
订货号以 0AA1 结尾的 CPU 型号不能降级为任何之前的固件版本。
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底