

一、功能指令
1)概述
功能指令实际上就是一个个具有不同功能且被封装好的函数块,功能指令的利用不仅提高了编程效率,还拓宽了PLC的应用范围。
2)格式和执行方式
功能指令一般由执行条件、指令符号和操作数三部分组成。可以选择连续执行和脉冲执行,选择脉冲执行时需要在指令符号后加(P),表示检测到执行条件(X0)的上升沿时执行一次;连续执行则表示当X0为ON状态时一直执行。
处理32位数据时需要在指令符号前加(D)。
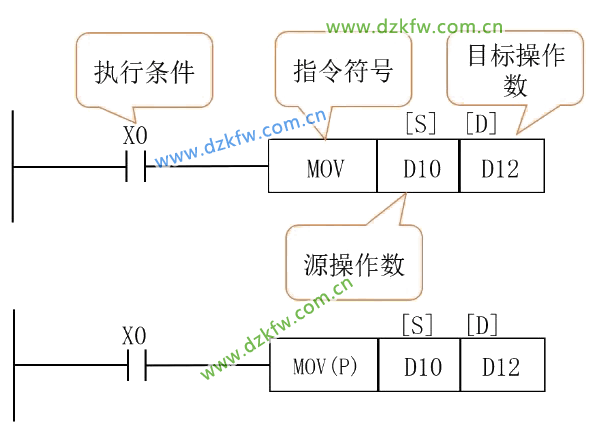
用MOV指令完成任务,要了解MOV指令使用的格式:

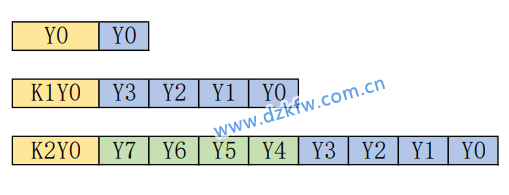
注释:K表示十进制常数;H表示十六进制常数;KnX… KnS以K1Y000进行说明:K1Y000表示以Y0为开始的连续4*1个位,即Y0,Y1,Y2,Y3; T表示定时器;C表示计数器;D表示数据寄存器;V/Z表示变址寄存器。
例如:K1Y000表示Y000~Y003(4个),如果是K2Y000则表示Y000~Y007(8个)以此类推。
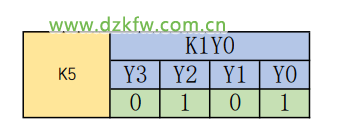
指令意思:k2变成0010然后放入Y003~Y000,即Y003=Y002=Y000=0,Y001=1
3)数据格式
a)位元件和字符件
只处理0/1的软组件称为位元件,如X、Y、M、S等。处理数字数据的组件称为字符件,如T、C、D等。一个字符件由16位的存储单元组成,其中最高位(第15位)为符号位,第0~14位为数值位。
b)位元件的组合
位元件组合起来也可以表示数字数据。每4个位元件为一组,通常在起始的软组件前加Kn,n为组数。16位数操作时可取K1-K4,32为操作数时可取K1-K8。
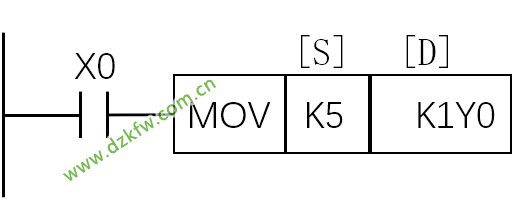
二、传送指令(MOV)
该指令的功能是将源操作数传送到指定的目标操作数。当执行条件为ON时,该指令执行;当执行条件为OFF时,该指令不执行,数据保持不变。下图表示将常数5传入到位元件组K1Y0中,在传入时常数5会自动转换为二进制数。
执行结果为
三、指令运用
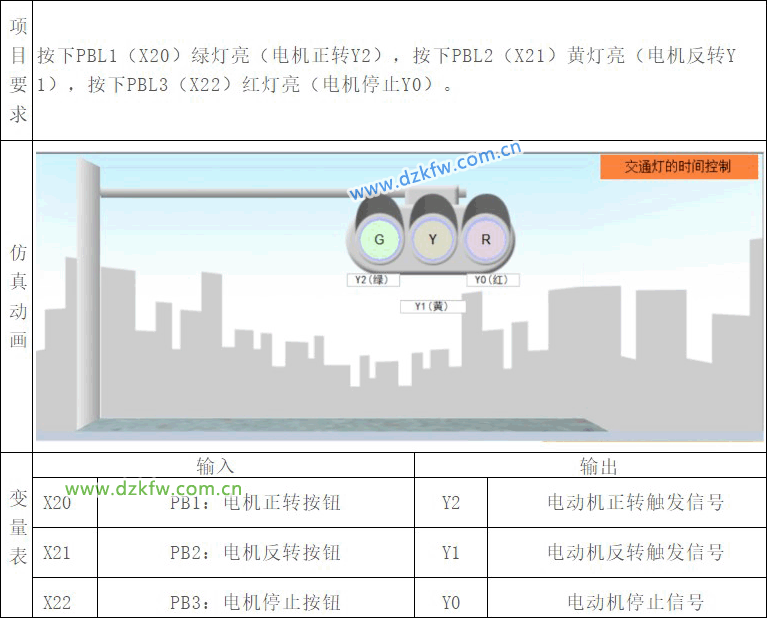
利用传送指令(MOV)实现电机的正反转控制。
1)确定变量表
进入项目后,根据项目要求和仿真动画确定各个元件所对应的I/O地址。
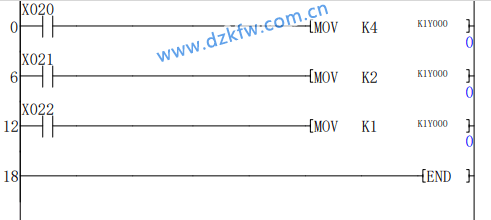
2)编辑程序
| 程序段1:电动机正转按下PB1将常数4传入位元件组K1Y0中,使Y2为ON。电动机正转的条件为:Y3为0,Y2为1,Y1为0,Y0为0。即对应的二进制数为:0100,转换为十进制则为:4。传送指令输入方式:MOV(空格)K4(空格)K1Y0
![]()
|程序段2:电动机反转按下PB2将常数2传入位元件组K1Y0中,使Y1为ON。电动机正转的条件为:Y3为0,Y2为0,Y1为1,Y0为0。即对应的二进制数为:0010,转换为十进制则为:2。

|程序段3:电动机停止按下PB3将常数1传入位元件组K1Y0中,使Y0为ON。电动机正转的条件为:Y3为0,Y2为0,Y1为0,Y0为1。即对应的二进制数为:0001,转换为十进制则为:1。

程序整体浏览
3)程序测试


 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底