

一、为嘛要采用制动电路?
当负载电机的转速由于惯性或某种原因高于变频器的输出转速时,电机由“电”态变为“动”态,暂时将电机变成发电机。一些特殊的机器,如矿井提升机、卷扬机、高速电梯、风机等。当电机减速、制动或放下重负载时,由于机械系统的势能和势能,电机的实际转速可能超过变频器的给定转速。电机转子绕组中感应电流的相位超前于感应电压,定子绕组中由于互感出现3354容性电流的感应电流。然而,二极管和电容器并联连接在变频器的逆变电路IGBT的两端。由于电机的容性励磁电流,产生励磁磁动势,电机通过自励发电,向电源反馈能量。这是一个电机将机械势能转化为电能并回馈给电网的过程。
再生的能量经与变频器逆变电路并联的二极管整流后,馈入变频器的DC电路,使DC电路的电压从530伏左右上升到六七百伏,甚至更高。特别是在需要减速停车的大惯性负载过程中,经常发生。这种电压的急剧上升可能会对变频器主电路的储能电容和逆变模块造成很大的电压和电流冲击甚至损坏。因此,制动单元和制动电阻(也称为制动单元和制动电阻)往往是变频器的必要或首选的辅助部件。在小功率变频器中,制动单元往往集成在功率模块中,制动电阻也安装在机体中。而大功率变频器的P、N端直接从DC电路中引出,用户根据负载运行情况选择制动单元和制动电阻。
一例维修实例:
台东一台7300PA 75kW逆变器因IGBT模块爆炸送修。检查U、V相模块是否全部损坏,驱动电路是否受到强电冲击,是否也有部件损坏。模块和驱动电路修复后,使用7.5kW电机进行调试,运行正常。即交付给用户安装使用。
运行一个月左右,用户因模块爆炸。再次检查两相模块是否损坏。不敢大意,但是问用户也不清楚。到用户的生产现场,我们可以找出损坏的原因。变频器原负载为负,因为工艺要求,运行三分钟,需要在30秒内停机。采用免费停车模式,现场做了一个测试。由于风扇是大惯性负载,电机完全停止需要将近20分钟。为了快速停止,用户将控制参数设置为减速,并将减速时间设置为30秒。减速停车过程中,电机再生电能反馈,使逆变器DC电路电压异常升高,有时会跳出过压故障而停车。通常,在用户执行故障复位后,它会被强制引导。正是这种反馈电能使得DC电路电压异常升高,超出了IGBT的安全工作范围而爆裂。
维修后向用户说明情况,并增加制动单元和制动电阻后,变频器投入运行,几年来没有再发生模块爆裂故障。
这种制动方式加快了机械惯性能量的消耗,有利于缩短停车过程,将电机的再生发电能量耗散到“制动阻力”上,其工作状态为动力制动状态。小功率变频器由内置制动开关管和内置制动功率电阻组成。根据DC电路的电压检测信号,直接控制制动开关管的通断或CPU输出控制指令,将制动电阻并联到DC电路中,使DC电路的电压增量变成电阻的热量,消散在空气中。
二、变频器制动电路的类型:
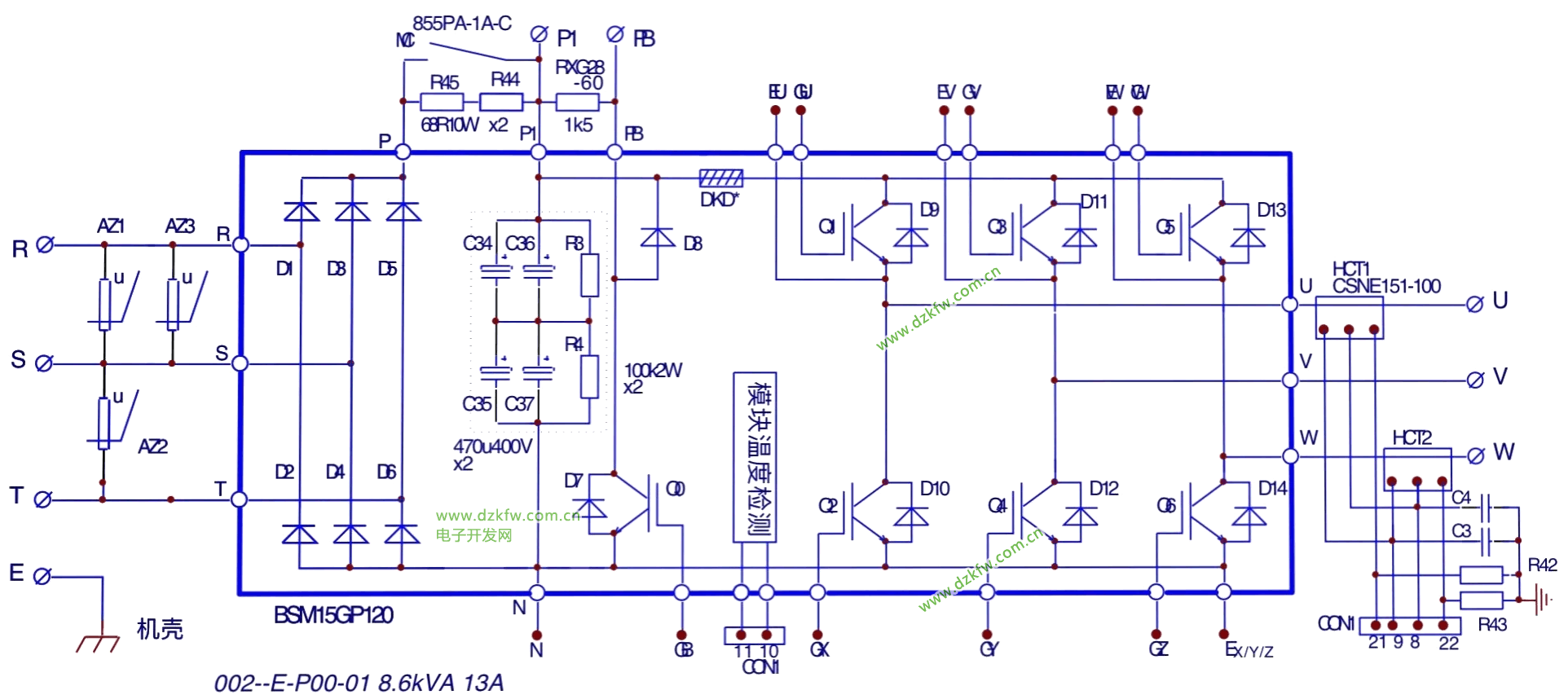
低功率逆变器型号通常采用集成模块,制动单元
制动控制信号有两个来源:
1.根据DC电路电压检测信号,CPU发出制动动作命令,由普通光耦或驱动光耦控制制动开关管的通断。制动命令可以是脉冲信号或DC电压信号;
2.DC电路电压检测电路将其处理成DC开关信号,直接控制光耦,进而控制制动开关管的开闭。
制动开关管的控制电路如下:
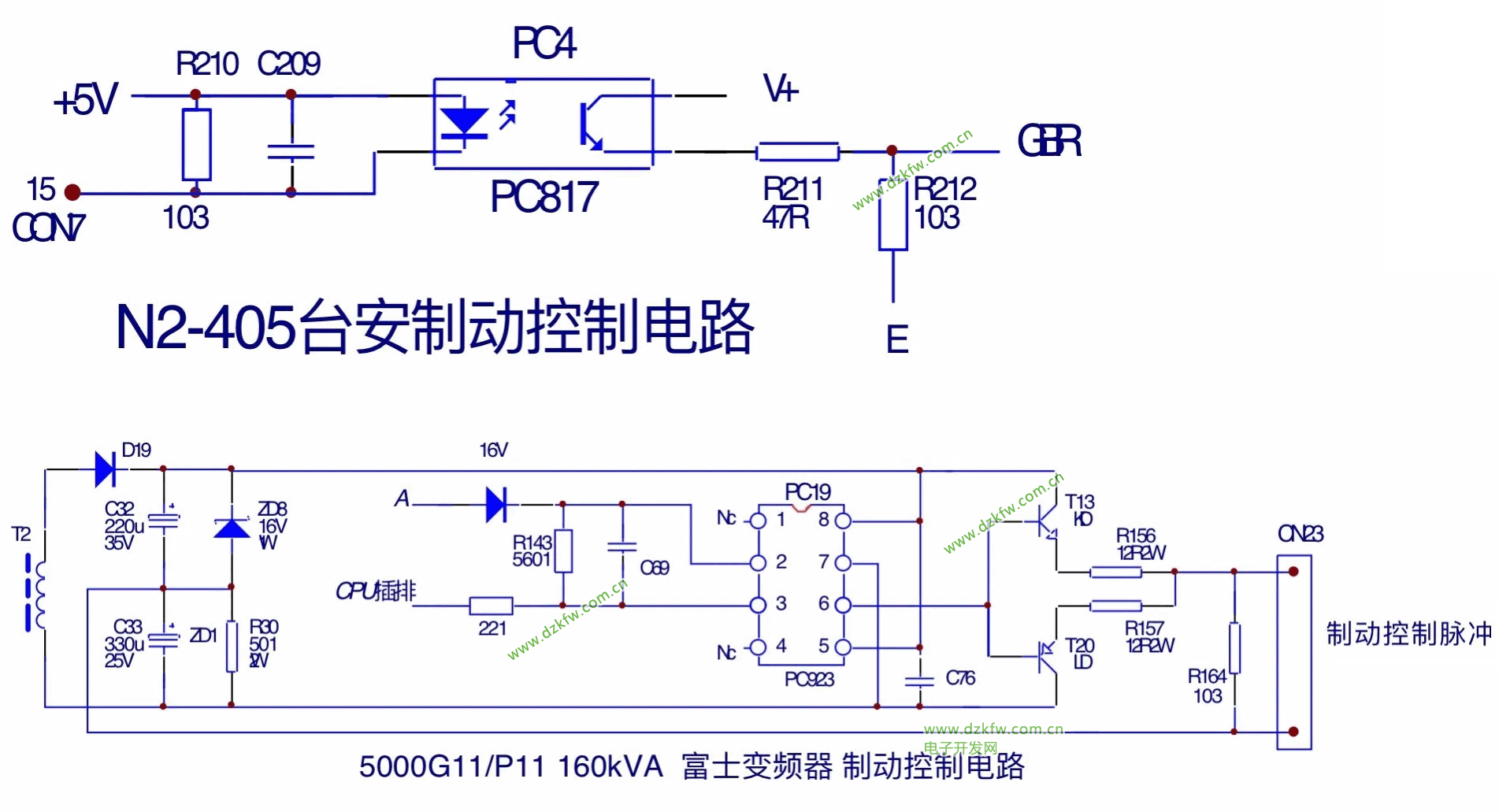
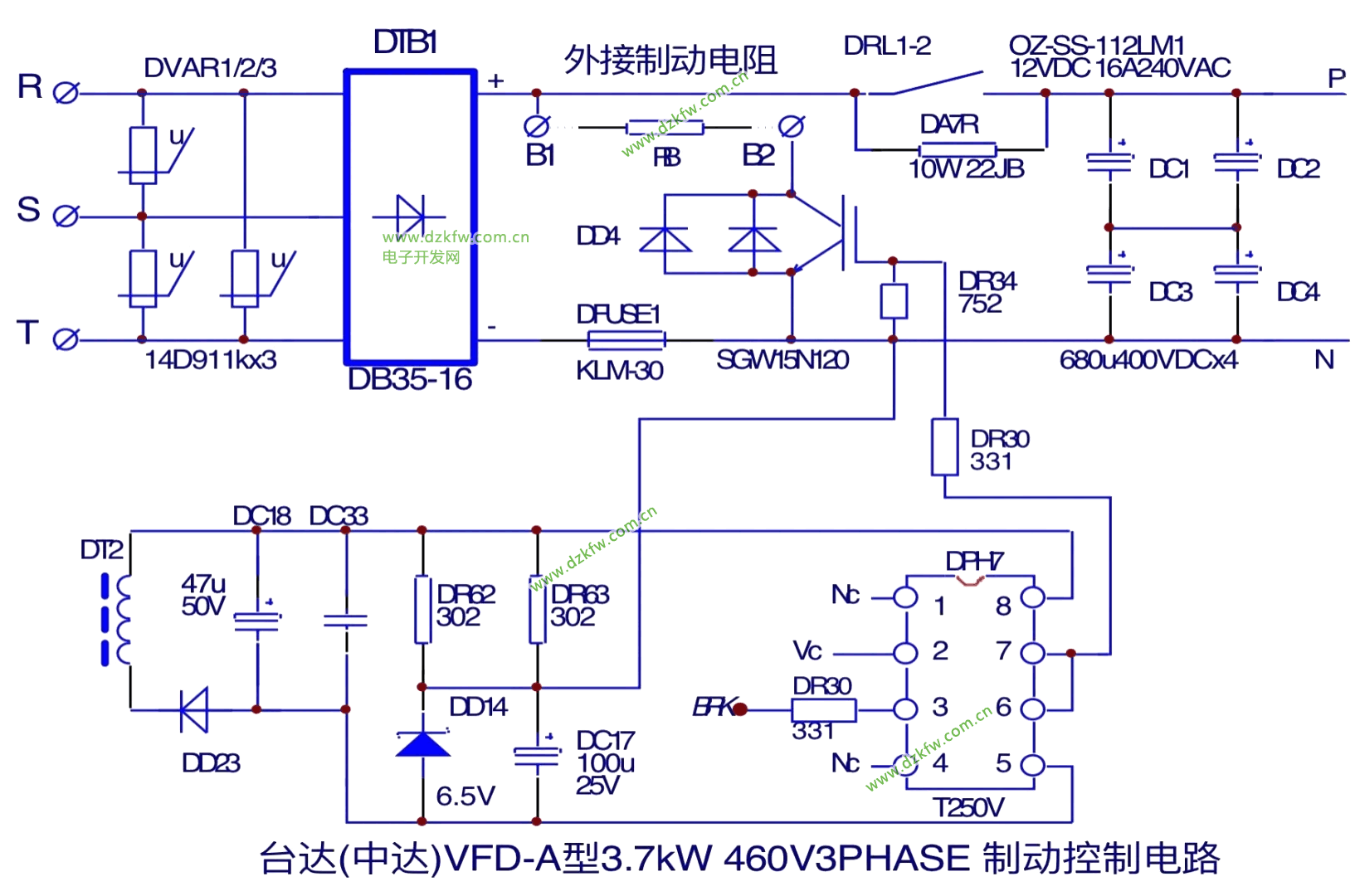
下图为台达VFD-A 3.7kW变频器的制动控制电路。控制电路由独立绕组供电,实现强弱电隔离。来自CPU的BRK信号经KPH光耦隔离,功率放大后驱动制动开关管。B1和B2是制动电阻器接入端子。
三、制动单元:
由于中大功率变频器的安装空间、制动功率和现场操作的差异,一般不内置制动开关管和制动电阻,仅从DC电路中引出P、N两个端子供用户外接制动单元和制动电阻。
下图显示了变频器选件——制动单元的电路原理图:
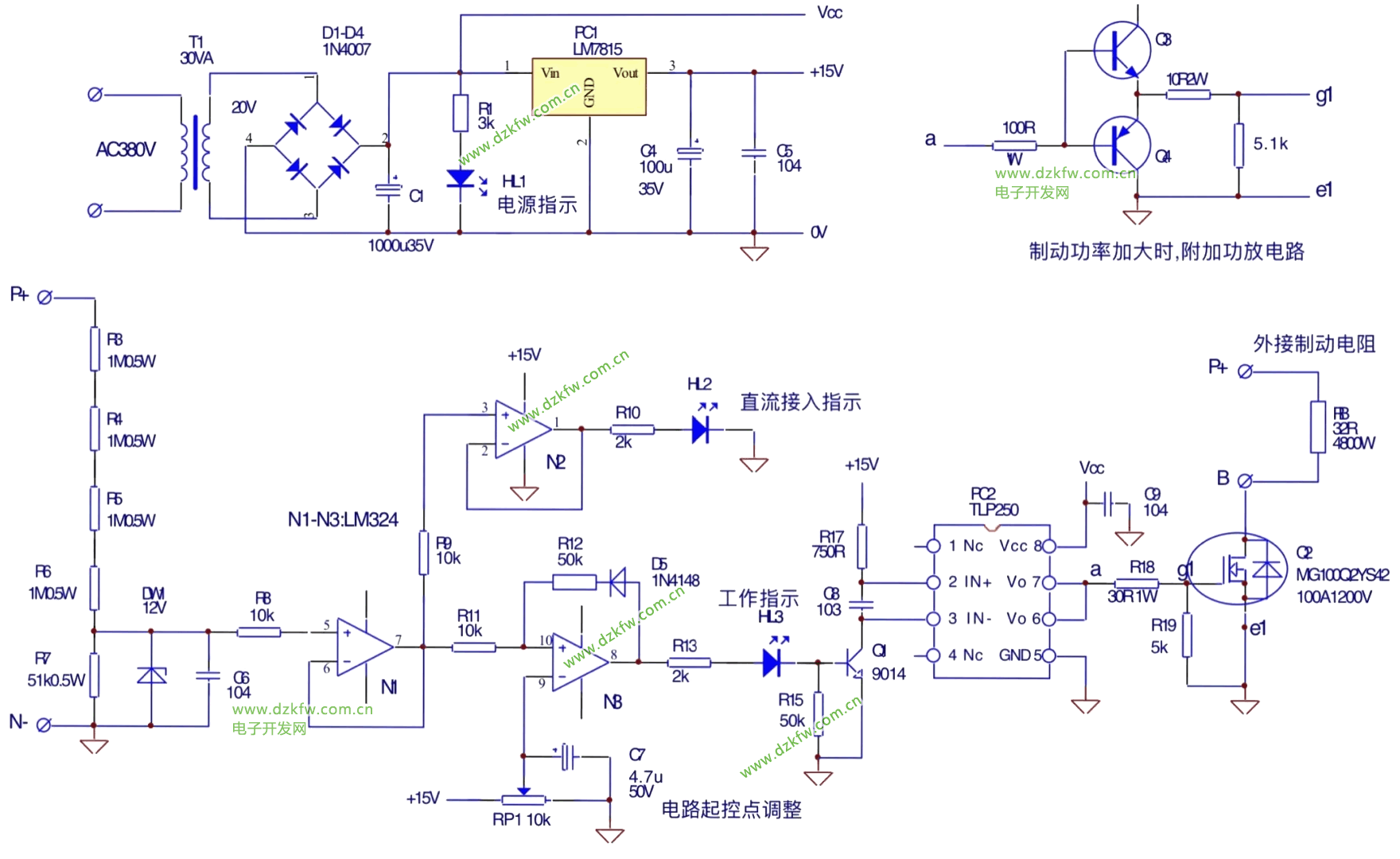
该制动单元的电源由380V/18V变压器获得,15V稳压电源由整流、滤波、稳压电路取出供整机控制电路使用。
变频器的p和N端子连接到制动单元的主电路和电压检测电路。电压采样电路由R3-R7组成。当DC电路电压为550V,R7约为7V时,稳压器DW2提供输入保护,C6滤除引线的噪声电压,检测电路通过R8输入到运算放大器LM324的5脚。该级放大器形成电压跟随器输出设备。7脚输出的电压检测信号通过R9施加到后级的电压跟随器,驱动HL2——主DC电路的电压接入指示灯;一路通过R11输入到后一级电压比较器的10引脚(非反相输入),该级放大器的9引脚(反相输入)与半可变电阻器RP1连接。连接RP1的目的是为了克服采样电阻网络的离散性,精确调整制动动作值。RP1的中心臂电压是基准电压。与该参考电压相比,10引脚电压检测信号的电压由于负载电机反向产生的能量而上升到660V(或680V)时,其电压约为8.5V。因为9脚的参考电压已经预先调整到8.4V左右,所以这组放大器的两个输入端信号比较的结果是放大器的输出反相,8脚的输出处于高电平,HL3指示灯亮。HL3的电流通路正好是Q1的正偏置通路,晶体管Q1导通,提供驱动IC-TLP520(光耦驱动IC)的输入电流。TLP250的6/7输出引脚输出正激励电压,该电压通过R18直接驱动IGBT模块。图2中的Q2是IGBT模块,型号为MG100Q2YS42,100A模块。当需要较大的制动功率来驱动较大的IGBT模块时,从A点接入一个由两个中大功率三极管组成的互补电压跟随器(功放电路),PC2输出的励磁电流信号放大到一定幅度后再驱动IGBT开关模块。
制动单元电路通常由三部分组成:1 .电源电路由降压变压器整流、滤波、稳压得到;通过功率电阻降压稳压获得;注意第一点和第二点,是通过开关电源的逆变、整流、稳压得到的。本电路采用第一种供电方式。2.DC电路电压检测(采样)电路:一般由电阻分压网络获得,然后由后级的电压比较器取出制动动作信号,送到后级的IGBT模块驱动电路。3.IGBT模块驱动电路。简单来说,制动单元就是一个电子开关,承担着将制动电阻连接到DC电路的任务。用接触器代替这个电子开关也不是不可能的。反正开关打开时,电路中还有一个“限流”的制动电阻,所以开关本身的安全性还是有保证的,只有开关的额定电流值才能拿走一定的财富。对于电子开关器件,当然也要考虑工作中的散热问题。简单的控制就是电压比较器的输出信号直接控制驱动器IC的输出。当DC电路电压高达660V时,模块打开(开关闭合),连接制动电阻进行“能耗制动”。当DC电路电压回落到600V左右时,电压比较器的输出状态反转,模块关断(开关关断),制动动作结束。制动点和终点的设定没有那么严格和准确,各厂家的设定值可能会有一些偏差,只要保护好DC电路不受高压冲击即可。注意一点驱动电路,IGBT模块是脉冲驱动,效果更好。
四、另一种制动方式:
以上制动方式可以缩短制动过程,保护IGBT和DC电路储能电容。还有一种制动控制模式,目的是不消耗反向发电的再生能量,电机负载不一定是惯性负载。即在电机的定子绕组上施加直流电,也就是通常所说的直流制动。对于需要准确或快速停车的场合,可以在启动前停止外部因素引起的电机不规则转动。通过变频器的逆变电路可以方便地实现DC制动控制。
比如纺织机,如果停得太猛,很容易断针;如果停得太慢,很容易断线。当需要减速到某一值时,在1.2秒内轻停。通过机械变频器拖动并设置以下参数:1 .启用DC制动功能;2.DC制动的启动频率,即电机运行实施DC制动的频率。降低启动频率,如8Hz,效果更佳;3.制动力和速度由给定的DC电压值决定;4.给定时间的制动电压。其中2、3、4必须根据现场情况进行测试和调整。
DC制动工作时,逆变器先中断三相电压输出,再向定子绕组输出DC,实现能耗制动。在这个过程中,电机产生的再生能量没有馈入变频器的DC电路,因此不需要安装制动单元和制动电阻。
但是,如果是惯性负载,可能需要在减速期间激活制动单元和制动电阻器。
有些人认为只要要求快速停车,就应该安装所有的制动单元和电阻,这是一个误区。有些机器几乎没有惯性。当马达停止时,机器不会移动。使用常规的自由停车控制就足够了。变频器的输出一停止,机器就会立即停止。
对于大惯性机械,如果没有停机要求,停一个小时也不会耽误什么。也可以通过免费停车来控制。
在这两种情况下,只要能够采用自由停车控制模式,就没有必要安装制动单元和制动电阻器。
制动单元和制动电阻只在停车快且需要停车时间的地方使用。变频器处于减速停车控制模式,起到消耗电机再生能量,保护IGBT安全,缩短


 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底