
绝对定位(absolute)
相对定位(relative localization)
三菱PLC绝对定位和相对定位指令用法
(1)相对定位 DRVI、DDRVI
以相对驱动方式执行单位速度的指令。用带正负的符号指定从当前位置开始的移动距离方式,也称增量驱动方式,如下列图标所示:
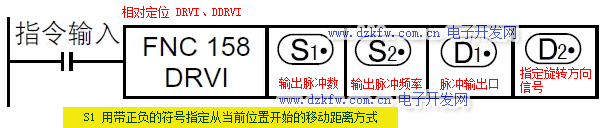
图4-18 DRVI指令格式
表4-14 相对运动指令的操作数
| 操作数种类 | 内容 |
|---|---|
| S1 | 指定输出脉冲数(相对地址)。※1 |
| S2 | 指定输出脉冲频率。※2 |
| D1 | 指定输出脉冲的输出编号。 |
| D2 | 指定旋转方向信号的输出对象编号。 |
※1.设定范围: 16位运算时为-32,768~+32,767(0除外)
32位运算时为-999,999~ +999,999(0除外)
※2.设定范围: 16位运算时为10~+32,767(Hz)
32位运算时如下所示。
(2)绝对定位 DRVA、DDRVA,如下列图表所示:
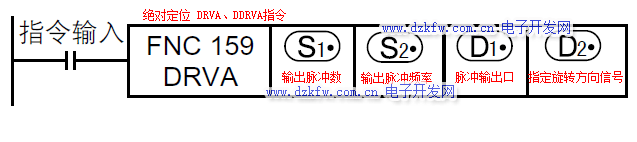
图4-19 DRVA指令格式
表4-15 绝对运动指令操作数
| 操作数种类 | 内容 |
|---|---|
| S1 | 指定输出脉冲数(绝对对地址)。※1 |
| S2 | 指定输出脉冲频率。※2 |
| D1 | 指定输出脉冲的输出编号。 |
| D2 | 指定旋转方向信号的输出对象编号。 |
※1.设定范围: 16位运算时为-32,768~+32,767(0除外)
32位运算时为-999,999~ +999,999(0除外)
※2.设定范围: 16位运算时为10~+32,767(Hz)
32位运算时如下所示。
33图4-20 相对绝对指令程序举例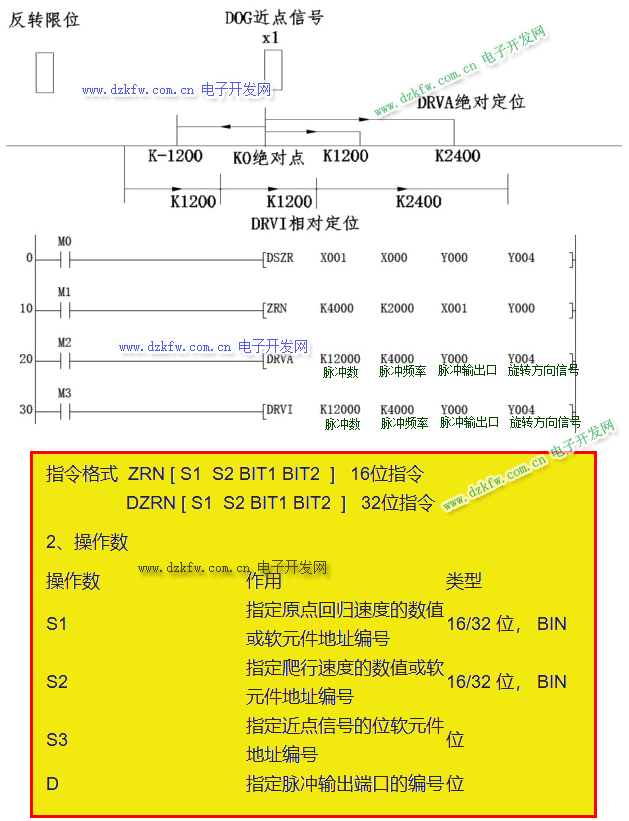
三菱PLC指令教程DDRVI和DDRVA、ZRN、DZRN指令用法实例

 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底