
����PLC��������
����1��ϵͳ��ʼ����һ��С��PLC��ϵͳ��ʼ����Ҫ�ǽ��г�ʼ�������á�������չģ���;
����2��ɨ�����룺ɨ��IO�����ź�;
����3��ִ�����������û�PLC����ִ����;
����4�����������PLC��ϡ�ά��������ϵͳ����ִ��;
����5��ɨ�����������ִ�еĽ�����;
����6��ͨ�Ź�����Ԫ��ͨ�ŷ��������Ӧ�������������ͨ������
����PLC���з�ʽ��
������������Կ���PLC��������һ��ѭ��ɨ������з�ʽ��ʵ����PLC���ж�ʱɨ����ж�ɨ�蹲����ɨ�跽ʽ��
����ѭ��ɨ�裺PLC����ͼѭ��ִ��;
������ʱɨ�裺PLC�����û����õ�ʱ�䶨ʱɨ�裬�ȷ�˵50msɨ��һ�Σ�ʹ������ɨ�跽ʽ���û���Ҫ��֤�û��������趨ʱ����һ����ɨ����ϣ�һ��PLCʹ�ö�ʱ�жϺ��ӳ���������ʵ���������(������������ж�ɨ�跽ʽ����ͬ)������IOɨ�跽�����һЩϸ�IJ�ͬ���ܿ��ܻ��õ�����ˢ��IO�Ĺ��ܿ�UpData_IO��
�����ж�ɨ�裺�ж�ɨ������ⲿ�����ڲ��жϵļ����ж�ɨ���������С��ȷ�˵�ⲿIO�жϡ����ټ����жϡ���ʱ�жϵȡ�
����ʮ�š�PID�����¿ء���Ƶ
����PID(Proportional, Integral andDerivative)�DZջ���������õ�һ���㷨���ڰ����¿ء�ˮ�á��������ŷ������˿ص���ҵ�õ��˹㷺��Ӧ�ã�����Ϊÿ��Ӧ�õĶ������Զ���һ�������Ҫ����Թ���ʦ�ʷ��˽�PID�Ŀ���ԭ����ֻ���������Dz��ܰ�PID��Ӧ�úá�
����PIDԭ����
����PID���ɱ������֡���������������ɵģ���ʵ��Ӧ���о���ֻʹ�����е�һ����������P��PI��PD��PID�ȡ�
�����ӿ���ԭ����˵����һ�����ƶ�������ϣ�����Ƶ�����ﵽ�����趨��ֵ������ͨ����ʹ�ÿ������߱ջ����ƣ�������ƶ������Ӧ���ȶ������ܵ��������ڵ�Ӱ�죬���ǿ���ѡ�ÿ������ơ���֮������ض����ܵ��趨ֵ�����ػ���Դ�˵�Ӱ�����������������Ӧ��ѡ�ñջ����ơ���ͼ��һ���¿ص�ԭ��ͼ��
����PIDִ������(1/10��) ��������
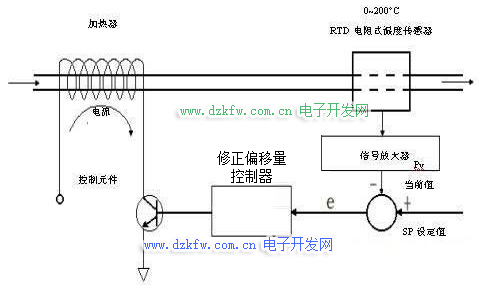

������������(P)��
����������������õĿ����ֶ�֮һ����Ҳ��������˵ĸй۵�һ�ֿ��ƣ��ȷ�˵���ǿ���һ���������ĺ���100�ȣ�����ʼ����ʱ����Ŀ���¶����Ƚ�Զ����ʱ����ͨ����Ӵ���ȣ�ʹ�¶ȿ������������¶ȳ���100��ʱ��������ر������ͨ�����ǻ�ʹ������һ������
����e(t) = SP �C y(t);
����u(t) = e(t)*P
����SP�����趨ֵ
����e(t)�������ֵ
����y(t)��������ֵ
����u(t)�������ֵ
����P��������ϵ��
�����ͺ��Բ��Ǻܴ�Ŀ��ƶ���ʹ�ñ������Ʒ�ʽ�Ϳ����������Ҫ���ܶ౻�ض�������Ϊ���ͺ��ԡ�
�����ȷ�˵�ܽ�������������趨�¶���200�ȣ������ñ�����ʽ����ʱ�����Pѡ��Ƚϴ������ֵ��¶ȴﵽ200�����Ϊ0���¶���Ȼ��ֹ��ס�������������ȷ�˵����230�ȣ����¶ȳ���200��̫����ֿ�ʼ���䣬������ʱ�����ʼ�������ȣ����¶���Ȼ�����µ���һ�����¶ȲŻ�ֹ���������ȷ�˵����170�ȣ��������ϵͳ���ȶ���һ���ķ�Χ�ڽ�����
 ���ض���
���ض��� ˢ��ҳ��
ˢ��ҳ�� �µ�ҳ��
�µ�ҳ��