
软启动器的工作原理:(非电子专业可能无法理解)
软起动主要由串接于电源与被控电动机之间三对反并联晶闸管调压电路构成。现代软启动器基本上都采用了电力电子技术和微机控制技术,以单片微机作为中央控制器控制核心来完成测量及各种控制算法。
因此,软启动器具备了很强的功能和灵活性。整个起动过程是数字化程序软件控制下自动进行。利用三对晶闸管的电子开关特性,通过MCU或单片机控制其触发脉冲的迟早来改变触发角的大小。而改变触发导通角的大小,又改变了晶闸管的导通时间,Z终改变定子绕组的三相电压的大小。
软启动器的工作原理:
主要元件:
1、晶闸管:每相一对反并联晶闸管,这是主要的功率元件,也是软启动器的主要成本之一,国内做反并联晶闸管的厂家有很多,从便宜的到贵的都有,质量更是参差不齐。
2、控制主板:基本上每个厂家都有自己开发的主板,市场上也有很多通用主板,质量更是好坏不一。就拿主板上的执行元件――光耦来说吧,如果质量不好坏了,即使其他部分是好的,那软启动器也得歇菜。
为什么呢?因为光耦在恶劣环境下很容易坏,而软启动器本身就是大电流环境,启动时电流大压降也大,主板上的工作电源波动也大,也很容易对这些元件造成干扰,从而间接地导致损坏。
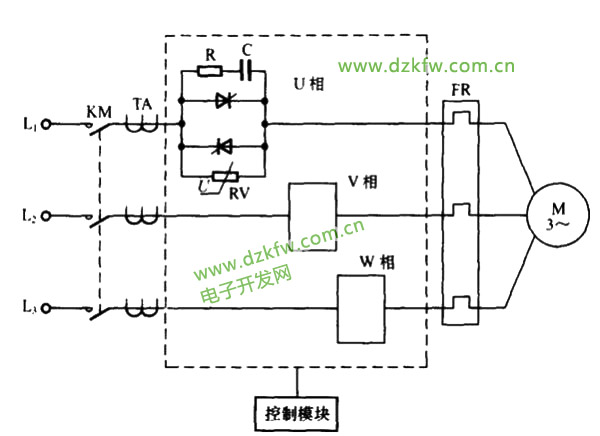
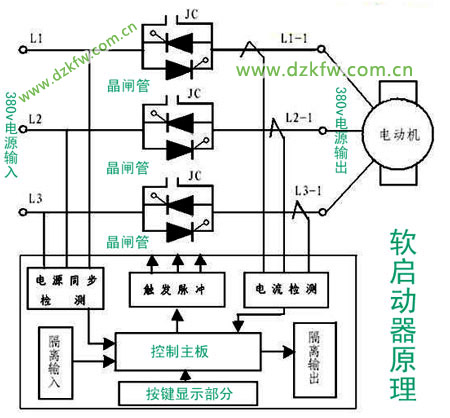
软启动器的工作原理图
异步电动机定子调压的结果:
一方面其转矩近似与定子电压的平方成正比,另一方面电动机的电流又和定子电压成正比。电动机的起动转矩和初始电流的限制可以通过定子电压的控制来实现,而定子电压又是通过可控硅的导通相角来控制的。
所以不同的初始相角可实现不同的端电压,以满足不同的负载起动特性。电动机起动过程中,晶闸管的导通角逐渐增大,晶闸管的输出电压也逐渐增加,电动机从零开始加速,直到晶闸管全导通,从而实现电动机的无级平滑起动。电动机工作在额定电压的机械特性上。电动机的起动转矩和起动电流的上限值可根据负载情况设定。
一种比较通俗的讲法,一般电工都可以理解:
软启动器的电路可以比作是三相全控桥式整流电路。软启动器启动电动机时,晶闸管的输出电压逐渐增加,电动机逐渐加速,直到晶闸管全导通,电动机工作在额定电压的机械特性上,实现平滑启动,降低启动电流,避免启动过流跳闸。
等待电机达到额定转数时,电流会降到正常值,软启动器自动用旁路接触器取代已完成任务的晶闸管,这样启动的启动过程也就结束了。使用了旁路接触器的软启动器可以更好地延长软启动器的使用寿命,提高其工作效率,又使电网避免了谐波污染,同时价格也比较便宜。
软启动器的软停车功能软启动过程相反,电压逐渐降低,转数逐渐下降到零,避免自由停车引起的转矩冲击,这里就不过多地介绍。
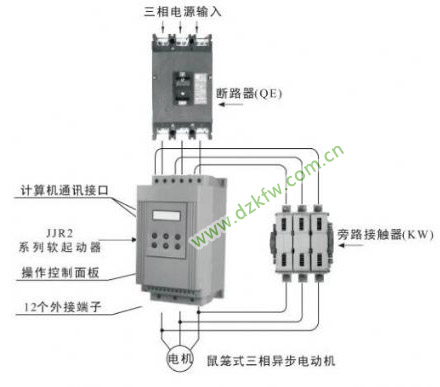
软启动器一次接线示意图:
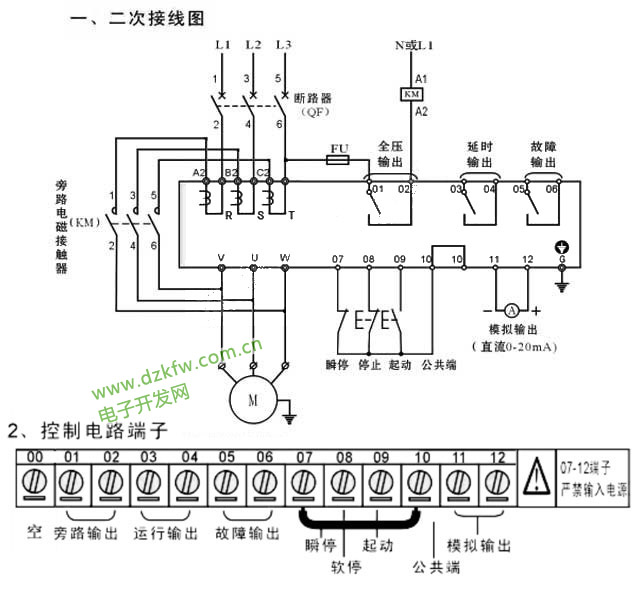
软启动器二次控制接线图:
软启动的好处:
1.降低电动机的起动电流,减少配电容量,避免增容投资;
2.减少起动应力,延长电动机及相关设备的使用寿命;
3.平稳的起动和软停车避免了传统起动设备的喘振问题、水锤效应;
4.多种起动模式及宽范围的电流、电压等设定,可适应多种负载情况,改善工艺;
5.完善可靠的保护功能,更有效的保护电动机及相关设备的安全;
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底