

在自动化设备中,经常用到伺服电机,特别是方位操控,大部分品牌的伺服电机都有方位操控功用,经过操控器发出脉冲来操控伺服电机运转,脉冲数对应转的角度,脉冲频率对应速度(与电子齿轮设定有关),当一个新的体系,参数不能工作时,首要设定方位增益,保证电机无噪音状况下,尽量设大些,转动惯量比也非常重要,可经过自学习设定的数来参考,然后设定速度增益和速度积分时间,保证在低速运转时连续,方位精度受控即可。
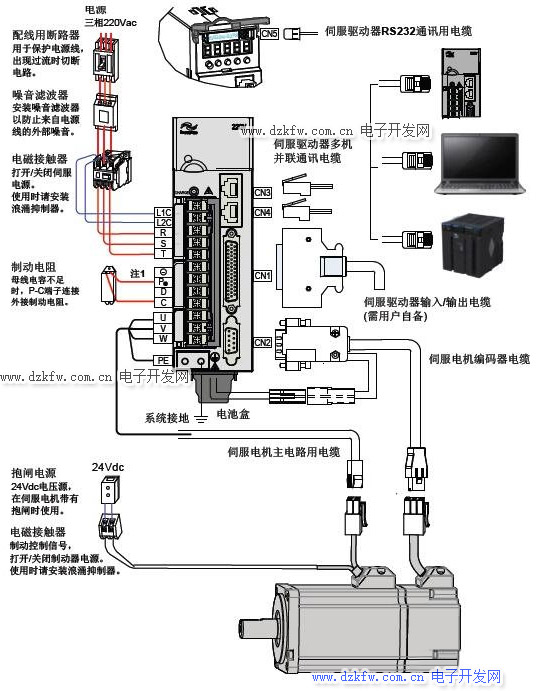
伺服驱动器参数端口和伺服电机接线图如下:

(1)方位份额增益
设定方位环调节器的份额增益。设置值越大,增益越高,刚度越大,相同频率指令脉冲条件下,方位滞后量越小。但数值太大或许会引起振动或超调。参数数值由详细的伺服体系类型和负载状况确认。
(2)方位前馈增益
设定方位环的前馈增益。设定值越大时,表明在任何频率的指令脉冲下,方位滞后量越小方位环的前馈增益大,操控体系的高速呼应特性提高,但会使体系的方位不安稳,容易发生振动。不需求很高的呼应特性时,本参数通常设为0表明规模:0~100%。
(3)速度份额增益
设定速度调节器的份额增益。设置值越大,增益越高,刚度越大。参数数值根据详细的伺服驱动体系类型和负载值状况确认。一般状况下,负载惯量越大,设定值越大。在体系不发生振动的条件下,尽量设定较大的值。
(4)速度积分时间常数
设定速度调节器的积分时间常数。设置值越小,积分速度越快。参数数值根据详细的伺服驱动体系类型和负载状况确认。一般状况下,负载惯量越大,设定值越大。在体系不发生振动的条件下,尽量设定较小的值。
(5)速度反应滤波因子
设定速度反应低通滤波器特性。数值越大,截止频率越低,电机发生的噪音越小。假如负载惯量很大,可以适当减小设定值。数值太大,形成呼应变慢,或许会引起振动。数值越小,截止频率越高,速度反应呼应越快。假如需求较高的速度呼应,可以适当减小设定值。
(6)最大输出转矩设置
设置伺服驱动器的内部转矩约束值。设置值是额定转矩的百分比,任何时候,这个约束都有用定位完结规模设定方位操控方法下定位完结脉冲规模。本参数供给了方位操控方法下驱动器判别是否完结定位的根据,当方位偏差计数器内的剩余脉冲数小于或等于本参数设定值时,驱动器认为定位已完结,到位开关信号为ON,否则为OFF。
在方位操控方法时,输出方位定位完结信号,加减速时间常数设置值是表明电机从0~2000r/min的加速时间或从2000~0r/min的减速时间。加减速特性是线性的抵达速度规模设置抵达速度在非方位操控方法下,假如伺服电机速度超过本设定值,则速度抵达开关信号为ON,否则为OFF。在方位操控方法下,不必此参数。与旋转方向无关。
(7)手动调整增益参数
调整速度份额增益KVP值。当伺服体系安装完后,有必要调整参数,使体系安稳旋转。首要调整速度份额增益KVP值。调整之前有必要把积分增益KVI及微分增益KVD调整至零,然后将KVP值逐渐加大;同时观察伺服电机中止时足否发生振动,而且以手动方法调整KVP参数,观察旋转速度是否明显忽快忽慢。KVP值加大到发生以上现象时,有必要将KVP值往回调小,使振动消除、旋转速度安稳。此时的KVP值即开始确认的参数值。如有必要,经KⅥ和KVD调整后,可再作反复修正以到达理想值。
调整积分增益KⅥ值。将积分增益KVI值逐渐加大,使积分效应逐渐发生。由前述对积分操控的介绍可看出,KVP值合作积分效应增加到临界值后将发生振动而不安稳,好像KVP值一样,将KVI值往回调小,使振动消除、旋转速度安稳。此时的KVI值即开始确认的参数值。
调整微分增益KVD值。微分增益首要目的是使速度旋转平稳,降低超调量。因此,将KVD值逐渐加大可改善速度安稳性。
调整方位份额增益KPP值。假如KPP值调整过大,伺服电机定位时将发生电机定位超调量过大,形成不安稳现象。此时,有必要调小KPP值,降低超调量及避开不安稳区;但也不能调整太小,使定位功率降低。因此,调整时应小心合作。
(8)自动调整增益参数
现代伺服驱动器均已微计算机化,大部分供给自动增益调整(autotuning)的功用,可敷衍多数负载状况。在参数调整时,可先使用自动参数调整功用,必要时再手动调整。
事实上,自动增益调整也有选项设置,一般将操控呼应分为几个等级,如高呼应、中呼应、低呼应,用户可根据实际需求进行设置。
伺服电机接线图如下:





 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底