
随着智能化的发展要求,现在在机器人控制系统中,伺服电机扮演者重要角色,可以说机器人所需要的力、力矩等都有伺服电机提供,以保证其准确、快速的完成动作。
在我们工控中对于要求精度较高的场合需要使用伺服电机,与其说是伺服电机不如说它是一套伺服系统。伺服电机的工作原理在网上基本都可以查到,脉冲控制、精度定位、性能超越等优点。今天我们就简单介绍下工控中伺服驱动系统的接线。
伺服驱动系统主要由伺服电机、伺服驱动器、控制器组成,伺服电机自带编码器。我们以台达ASDA-B2伺服驱动器和ECMA-C20604RS型号的伺服驱动系统来说明,下图是系统接线图:
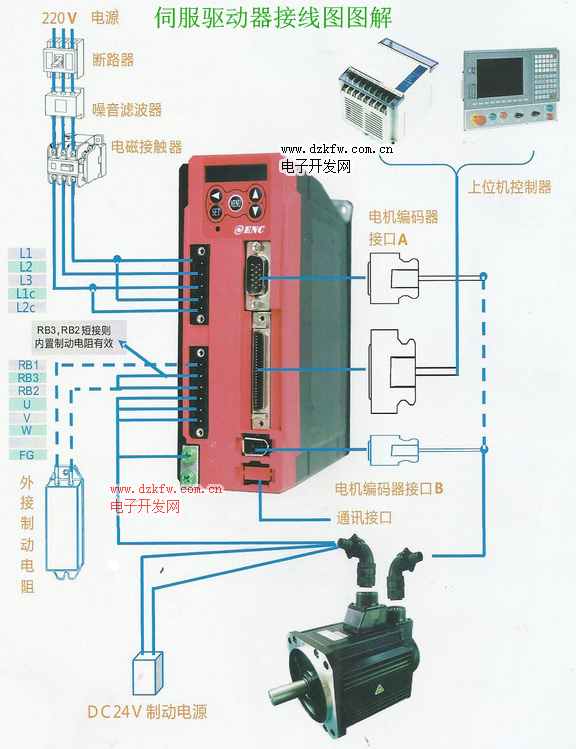
驱动系统接线图
01伺服驱动器
工控之伺服电机的编码器、电源、控制线的接线介绍
伺服驱动器

驱动器主要有控制回路电源、主控制回路电源、伺服输出电源、控制器输入CN1、编码器接口CN2、连接起CN3。控制回路电源是单相AC电源,输入电源可单相、三相,但是必须是220v,就是说三相输入时,咱们的三相电源必须经过变压器变压才能接,对于功率较小的驱动器,可单相直接驱动,单相接法必须接R、S端子。伺服电机输出U、V、W切记千万不能与主电路电源连接,有可能烧毁驱动器。CN1端口主要用于上位机控制器的连接,提供输入、输出、编码器ABZ三相输出、各种监控信号的模拟量输出。
02编码器接线
工控之伺服电机的编码器、电源、控制线的接线介绍
编码器接线

从上图看出九个端子我们只使用了5个,一个屏蔽线、电源线两根、串行通讯信号(+-)两根,与我们普通的编码器接线差不多。
03通讯端口
工控之伺服电机的编码器、电源、控制线的接线介绍
CN3通讯端口
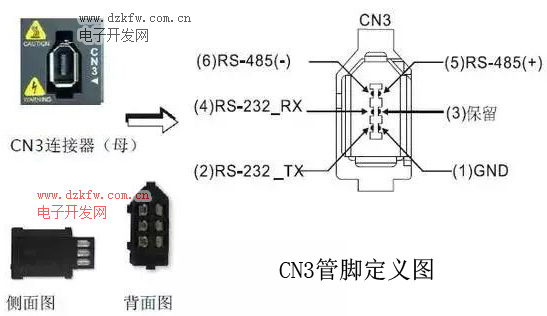
驱动器通过CN3端口与电脑PLC、HMI等上位机相连接,采用MODBUS通讯来控制驱动器,可使用RS232、RS485进行通讯。
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底