
西门子公司为适应小型运动控制需求,推出了一款小型高性能伺服SINAMICS V90。SINAMICS V90 伺服驱动和 SIMOTICS S-1FL6 伺服电机组成了性能优化,易于使用的伺服驱动系统,八种驱动类型,七种不同的电机轴高规格,功率范围从0.05kW到7.0kW以及单相和三相的供电系统使其可以广泛用于各行各业。比如:定位,传送,收卷等设备中,同时该伺服系统可以与S7-1500T/S7-1500/S7-1200 进行完美配合实现丰富的运动控制功能。那么,今天小编同大神一起,带你玩转西门子V90伺服驱动器。

分为脉冲序列版本(PTI)和PROFINET版本(PN)两种,如下图所示:

支持以下几种运动模式:
1) 外部脉冲位置控制模式(PTI)
2) 内部设定值位置控制模式(IPOS)
3) 速度模式(S)
4) 转矩模式(T)
PTI是伺服应用中最基本使用也是最频繁的模式,今天我们一起来学习如何使用该模式。通过PLC发送高速脉冲来驱动伺服进行定位,对于伺服的调试较为简单,繁琐的是在PLC中编写高速脉冲输出程序。
首先,应该对外部硬件连接,如下图所示。
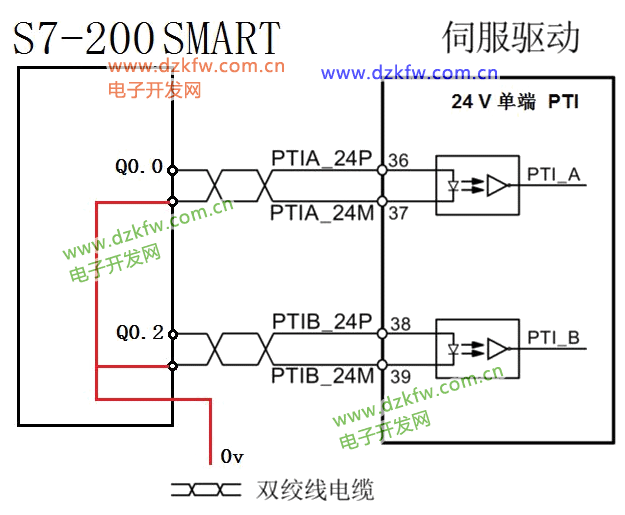
西门子plc和伺服驱动器的接线示意图
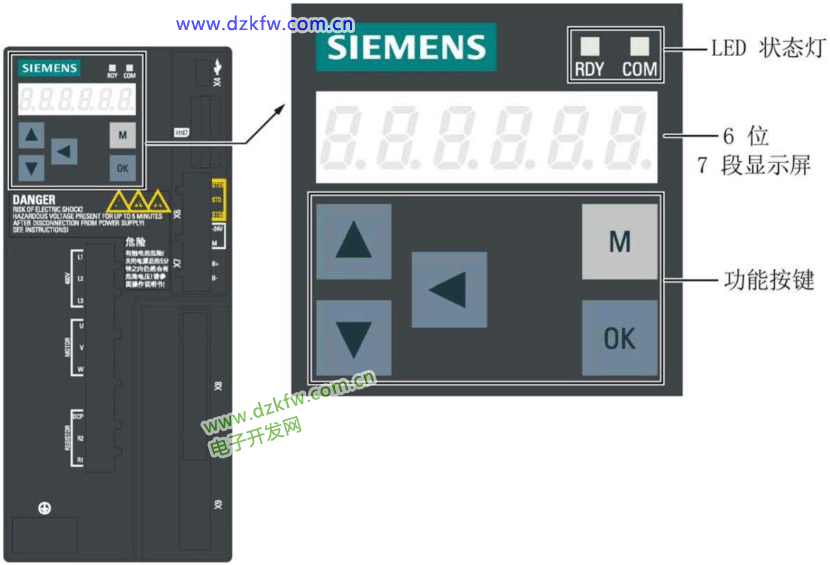
接下来开始对参数进行调试,可以通过驱动器面板和V-ASSISTANT软件两种方式调试参数,但软件与驱动器连接后面板则无法使用。此处简单介绍面板设置参数的方法,面板如下图所示。
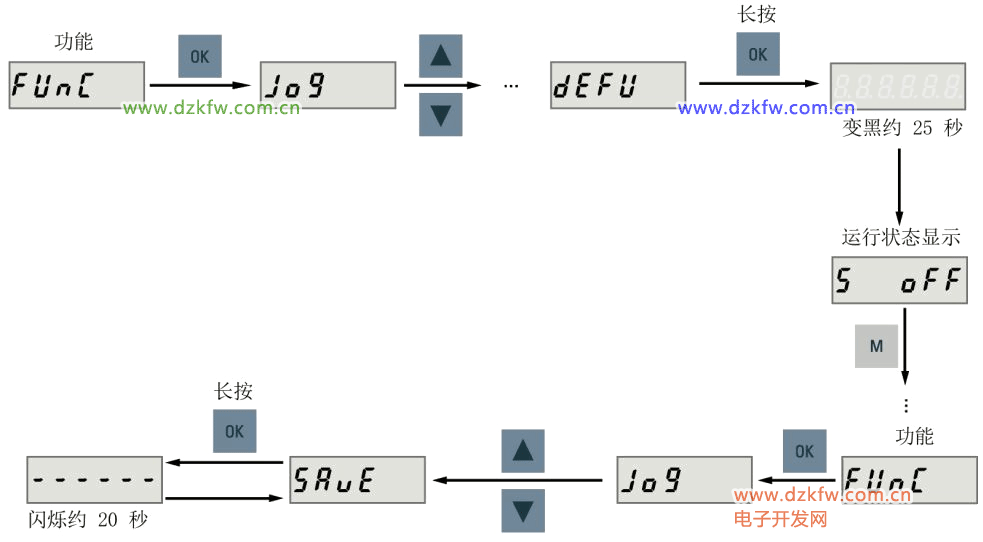
在设置参数前最好先进行恢复出厂设置,恢复完成后断电重启,方法如下图所示。
所有参数调试完成后都需要进行断电保持设置,将修改的参数存储到ROM保持区,否则断电后恢复缺省值,方法如下图所示。
设置参数步骤如下图所示:
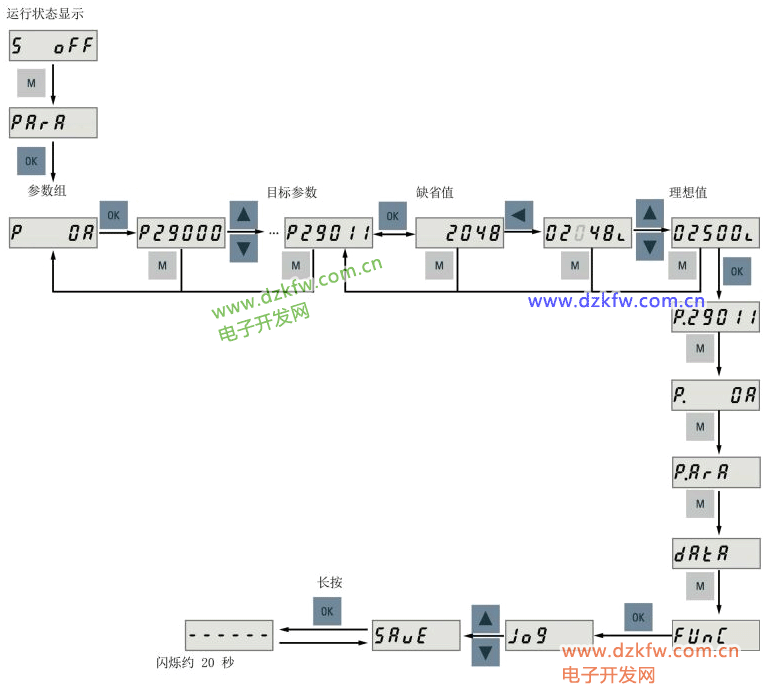
在进入参数设置前需要选择正确的参数组号如P0A,0B,0C,0D等,也可选择P ALL组,进入后通过<移位键来修改参数编号,如下图所示。

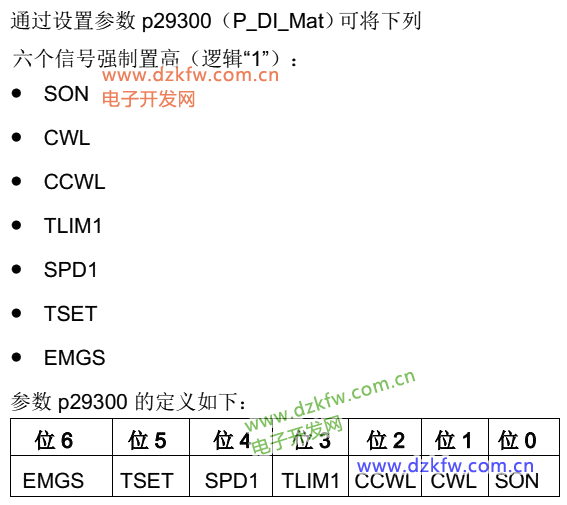
注意:初次上电驱动器未与PLC相连时,常出现F7491 、F7492和A52902号错误。原因为 顺时针行程限制信号(CWL)和逆时针行程限制信号(CCWL)以及急停(EMGS) 这三个信号为OFF。默认必须为ON才可运行,如果实际使用时无需用到这三个功能,可通过把P29300的第1、2、6位设为1来强制为ON,如下图所示。
注意:通过面板设置时要转换成十六进制数,通过软件设置则转换成十进制。
如未识别到伺服电机,则会发生故障 F52984。请手动输入电机ID(p29000)进行校准,电机 ID 可参见电机铭牌。
默认运行方向为 CW(顺时针)。如有必要,可通过设置参数 p29001 更改运行方向。p29001=0:CW,p29001=1:CCW
下面我们来看一下外部脉冲位置模式的调试步骤:
1、断开主电源;
2、将伺服驱动断电,并使用信号电缆将其连接至控制器(例如,SIMATIC S7-200 SMART)。为确保正常运行,数字量信号 CWL、CCWL 和EMGS 必须保持在高电平(1);
3、打开 DC 24 V 电源;
4、检查伺服电机类型;
・ 如果伺服电机带有增量编码器,请输入电机ID(p29000)-46
・ 如果伺服电机带有绝对编码器,伺服驱动可以自动识别伺服电机。
5、设置P29003=0脉冲位置控制模式(必须在使能关闭状态修改,默认p29003=0);
6、保存参数并重启伺服驱动以应用外部脉冲位置控制模式的设定;
7、设置参数 p29010 选择设定值脉冲信号形式。 ・ p29010=0:脉冲+方向,正逻辑;
8、设置参数 p29014 选择脉冲输入通道。p29014=1:24 V 单端脉冲输入;
24 V 单端脉冲输入为出厂设置。
9、设置电子齿轮比。通过参数 p29012 和 p29013 来设置电子齿轮比。
p29012:电子齿轮比分子。共有四个分子(p29012[0] 至p29012[3])。
p29013:电子齿轮比分母。 也可通过p29011: 每转设定值脉冲数。
10、设置扭矩限值和转速限值。内部设定值: p29043;
11、通过设置下列参数来配置必要的数字量输入DI信号:
出厂设置如下:(外部脉冲位置模式DI信号使用较少)
・ p29301[0]: 1 (SON) ・ p29302[0]: 2 (RESET)
・ p29303[0]: 3 (CWL) ・ p29304[0]: 4 (CCWL)
・ p29305[0]: 5 (G-CHANGE) ・ p29306[0]: 6 (P-TRG)
・ p29307[0]: 7 (CLR) ・ p99308[0]: 10 (TLIM1)
12、 检查编码器类型。如使用绝对编码器,必须通过 BOP 菜单功能“ABS”调整绝对编码器;
13、设置编码器脉冲输出;
14、通过 BOP 保存参数;
15、打开主电源;
16、清除故障和报警;
17、将信号 SON 置为高电平,通过指令设备输入外部脉冲,伺服电机开始运行。如果不使用外部使能,可将P29300的第0位设置为1使能强制为ON。
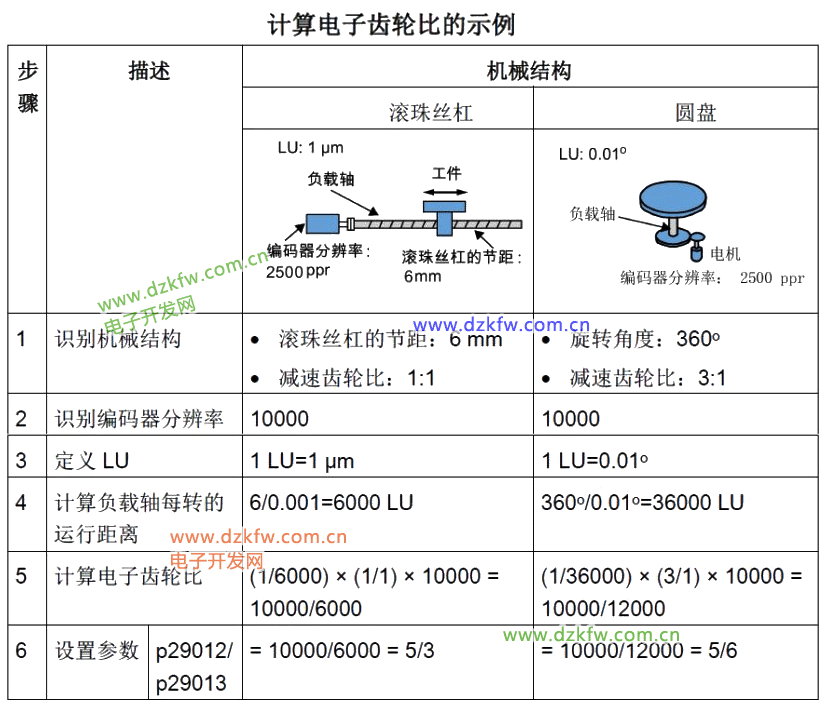
在上述步骤中,设置电子齿轮比较为繁琐,下面介绍一下电子齿轮比的设置方法。
电子齿轮比=反馈回来的脉冲数/发送过去的脉冲数
为什么要设置电子齿轮比,设置了齿轮比有什么作用?
一、是调整电机旋转1圈所需要的指令脉冲数,以保证电机转速能够达到需求转速。
例如上位机PLC最大发送脉冲频率为100KHz,若不修改电子齿轮比, 则电机旋转1圈需要10000个脉冲,那么电机最高转速为600rpm,若将电子齿轮比设为2:1,或者将每转脉冲数设定为5000,则此时电机可以达到1200rpm转速。
二、 避免脉冲数产生小数,取整后影响定位精度
根据第一种方法算出电子齿轮比,虽然速度满足了,还应考虑脉冲当量是否能满足精度要求,还要根据机械传动比测算一下脉冲当量,若无法满足可适当减小转速以达到精度要求。如果系统对精度要求很高需要较小的脉冲当量,则应根据脉冲当量运算,运算方法如下图所示。
总结:设定电子齿轮比肯定会降低伺服的分辨率影响精度,但合理的设置避免脉冲产生小数却能提高精度。且在误差允许范围内适当调整电子齿轮比可以提高电机转速,所以在设定电子齿轮比并不能一味的按照公式推算,应当权衡精度和速度的要求,使系统性能发挥到最佳。
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底