
�����ʲô��

�ŷ����ͨ������Ϊ���������һ�ִ���������Сװ�á����������ŷ�������һ�������ź�ʱ�������Ϳ���ת���ض���λ�á�ֻҪ�����źų������䣬�ŷ������ͻᱣ����ĽǶ�λ�ò��ı䡣��������źŷ����仯��������λ��Ҳ����Ӧ�����仯���ճ������У������������ң�طɻ���ң�������������˵�����
����ڻ���������dz����á���Ϊ��������õĿ��Ƶ�·�����ǵijߴ���Ȼ��С���������������Futaba S-148�����ı�������ṩ 0.3ţ/��Ť�أ�������������δ�С��˵���Ѿ��㹻ǿ���ˡ�ͬʱ��������ĵ��������е���ɳ����ȡ���ˣ�һ�����صĶ��ϵͳ��������̫���������
������ڲ��ṹ
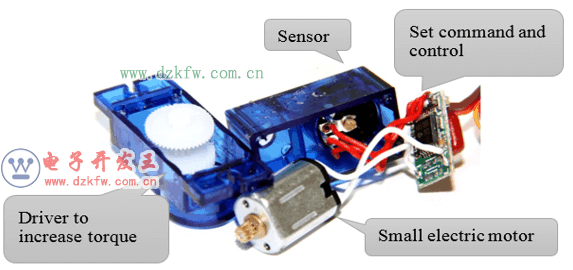
������ڲ��ṹ����ͼ��ʾ������Կ������Ƶ�·�����һ����ֺ���ǡ�
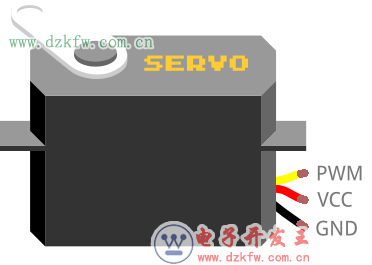
��Ȼ��������Դ�ߣ�+5V����ɫ�������ߣ�GND��ɫ����PWM�����ߣ���ɫ���ɫ����
����Ĺ���ԭ��
����ڲ��Ŀ��Ƶ�·����λ�ƣ��ɱ���������͵���������ӵ���·���ϣ����ڲ��ṹͼ���ұ߲��֡����Ƶ�·ͨ����λ�ƿɼ�ض���ĵ�ǰ�Ƕȡ�
������λ��������ź��������ô����ͻ�رա�������Ƶ�·��������ǶȲ���ȷ�����ͻ��������ת����ֱ�����ﵽָ���ĽǶȡ�����Ƕȸ��������̵IJ�ͬ��������ͬ�����磬һ��180�ȵĶ������������0����180��֮���˶���������λװ�ñ���װ�������װ���ϣ����������Χ��е�ṹ�Ͳ�����ת���ˡ�
��������������������Ҫת���ľ�������ȡ�����������Ҫת���ܳ��ľ��룬����ͻ�ȫ����ת�������ֻ��Ҫ�̾���ת��������ͻ��Խ������ٶ����У�������ٶȱ������ơ�
����ö��ת��ָ���Ƕȣ�
���������ڴ���Ƕȿ����źš�����Ƕ����ɿ����ź�����ij���ʱ������ģ���������������ƣ�PCM��������Ŀ���һ����Ҫһ��20ms���ҵ�ʱ�����壬������ĸߵ�ƽ����һ��Ϊ0.5ms-2.5ms��Χ���ܼ��Ϊ2ms������Ŀ��Ƚ���������ת���ľ��롣���磺1.5��������壬�����ת��90�ȵ�λ�ã�ͨ����Ϊ����λ�ã�����180������˵������90��λ�ã�������������С��1.5���룬��ô���������0�ȷ������������ȴ���1.5���룬����ͳ���180�ȷ�����180�ȶ��Ϊ������Ӧ�Ŀ��ƹ�ϵ�������ģ�
0.5ms��������-0�ȣ�
1.0ms��������45�ȣ�
1.5ms��������90�ȣ�
2.0ms�������C135�ȣ�
2.5ms�������C180�ȣ�
��Arduino UNO ���ƶ��
���Ե�Ӳ��������
• 1 �� Arduino UNO.
• 1 �� ���.
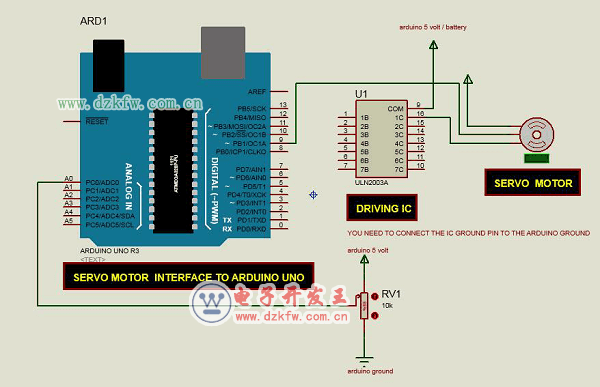
• 1 �� ULN2003 ����IC�����ڷ�ֱֹ��ͨ��Arduino��������������.��
• 1 �� 10 K�� ����.
������ͼ��ʾ�������ӣ���ͼ��ʾ��
��Arduino IDE���½�һ���ļ���

/* ʹ�ÿɱ��λ�ƿ��ƶ��ת�� */
#include
Servo myservo; // ����һ�� servo object
int potpin = 0; // analog pin �������ӵ�λ��
int val; // val�洢analog pin��ֵ
void setup() {
myservo.attach(9); // ���Ӷ�������źţ��ƻ�ף��� pin 9
}
void loop() {
val = analogRead(potpin);
// �����ɱ��λ�Ƶ�ֵ (��Χ 0 - 1023)
val = map(val, 0, 1023, 0, 180);
// ������ǶȽ������� (��Χ 0 - 180)
myservo.write(val); //����valֵ���ö��λ��
delay(15);
}
����ע�⣺������������ţ���Դ��GND���źţ�����Դ��ͨ���Ǻ�ɫ�ģ�Ӧ�����ӵ�Arduino���ư��ϵ�5V��ţ�GND����ͨ���Ǻ�ɫ����ɫ�ģ�Ӧ�����ӵ�ULN2003 IC��10-16�������һ�����ź���ͨ���ǻ�ɫ���ɫ�ģ�Ӧ�����ӵ�Arduino 9�����š�
�ɱ��λ��
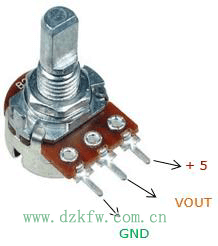
�ɱ��λ����һ����ѹ���������Ը��ݿɱ�����ֵ��������·�������ѹ��������ͨ����ť�����Ƶġ������������ţ�GND���źţ� +5 V������ͼ��ʾ
���Ϲ����������ϴ��������������µ�������ת�ɱ��λ�ƣ��������Ӧ�ı���Ƕ�λ�á�
 ���ض���
���ض��� ˢ��ҳ��
ˢ��ҳ�� �µ�ҳ��
�µ�ҳ��