
今天在修复离职同事遗留下来关于编码器的bug,我之前也没接触过这玩意,前辈的做法是在定时器中查询AB相的电平状态,来判断当前是正传还是反正。他搞了个定时器1溢出中断,将32M时钟进行了64000分频,131s,信号都漏掉了,我将其改为了1600分频,16位溢出也就是400ms,正常运行(IAR 8.20)。
这个问题在最新的IAR(IAR 9.30)不会复现,并且不管哪种分频在最新的IAR可以正常运行。也许还有地方的逻辑没有看明白,最终还是没有去改他的分频。
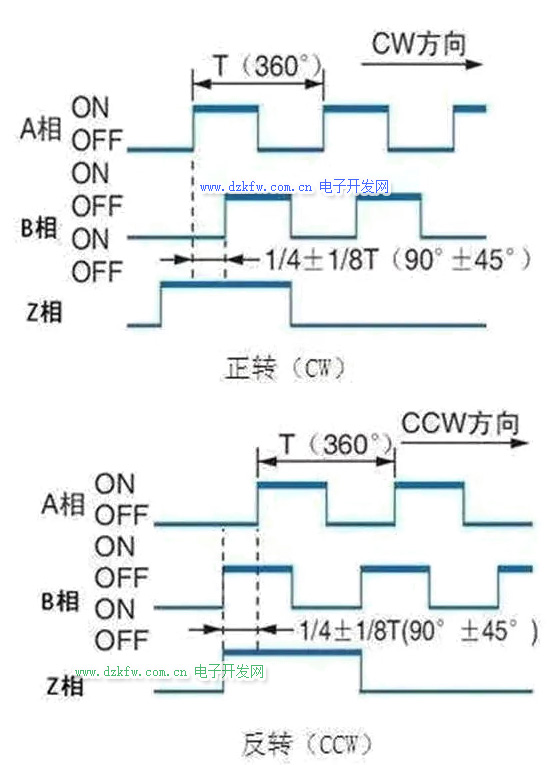
接下来我们直接来看关于编码器的图:
编码器工作原理及如何实现定位控制,秒懂!www.dzkfw.com.cn/Article/MEMS/5738.html
控制:
a. 以上连接是大概原理,我们不看z相,直接看关于AB相正反转的的控制:
1. 顺时针:A相触发上升沿,那么接下来B也触发上升沿;A相触发下降沿,B相也触发下降沿
2. 逆时针:A相触发上升沿,那么接下来B触发下降沿; A相触发下降沿,B相触发上升沿
b. 这样我就需要设置双边沿触发中断,但是对于一些低端的单片机来讲,可能无法做到,这个时候就需要用定时器和读IO的电平状态来做(前同事之前的做法是将coderScan()放到定时器中断函数中,为了处理几个和时间有关的任务,开了4个定时器,我们完全可以使用时间片的方式做)
1.顺时针: 如果A相前一刻的电平和当前电平不一样,并且当前电平为低,B相为低,则顺时针旋转; 如果B相前一刻的电平和当前电平不一样,并且当前电平为高,A相为低。
2. 逆时针: 如果A相前一刻的电平和当前电平不一样,并且当前电平为低,B相为高,则逆时针旋转;如果B相前一刻的电平和当前电平不一样,并且当前电平为高,A相为高。
void coderScan()
{
u8 i;
u8 aPin, bPin;
for(i=0; i<CODER_NUM; i++) //从编码器1 到 编码器n轮询检测
{
aPin = GPIO_ReadInputDataBit(CODER_IO_ARRAY[i].aPin.group, CODER_IO_ARRAY[i].aPin.pin);
bPin = GPIO_ReadInputDataBit(CODER_IO_ARRAY[i].bPin.group, CODER_IO_ARRAY[i].bPin.pin);
if((_coder[i].aPin != aPin) && (aPin == 0x00)) /* 读取到的值为低电平 */
{
if(bPin) // 电压下降有效
{
coderCCW(i);//逆时针旋转
}
else
{
coderCW(i);//顺时针旋转
}
}
else if((_coder[i].bPin != bPin) && (bPin == 0x01))
{
if(aPin) // 电压上升有效
{
coderCCW(i);//逆时针旋转
}
else
{
coderCW(i);//顺时针旋转
}
}
_coder[i].aPin = aPin;
_coder[i].bPin = bPin;
}
}
一般,编码器旋转一圈有1024个脉冲,而编码器是有格数的(每次咔吧一声转动了一格),我数了一下我手上的有30格,因此想要正确表示旋转,我们不仅要通过电平变化知道方向,还要根据脉冲格数来判断,也就是大概一格34个脉冲,如果按90%计算脉冲个数,也就检测到30个脉冲触发一次。
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底