
我们来看交流伺服电机定子的结构,如下图,伺服电机的定子由铁芯和绕组构成。我们这里讲的是三相交流伺服电机,所以它的定子分成三相绕组结构。定子的功能是通过三相交流电产生一个旋转磁场,其工作原理和普通三相电动机是一样的。

交流伺服电机转子的结构:交流伺服电机的转子是一个永磁体,伺服电机转动的原理就是在定子产生的旋转磁场作用下,转子和磁场同步旋转,因此伺服电机也可以说成是一个同步电机。


交流伺服电机编码器的结构:编码器是套在交流伺服电机转子的转轴上,当转子转动的时候,编码器的码盘也跟着转动。伺服电机的编码器是一个光电编码器,三菱伺服电机的编码器的分辨率是131072脉冲/转,也就是说当电机旋转一周,编码能够输出131072个脉冲。伺服电机的编码器是测定伺服电机的运行状况,当电机旋转时,编码器输出的脉冲反馈到伺服驱动器上,构成一个闭环控制。编码器由码盘、发光管、光电接收管、放大整形电路等几个部分构成。

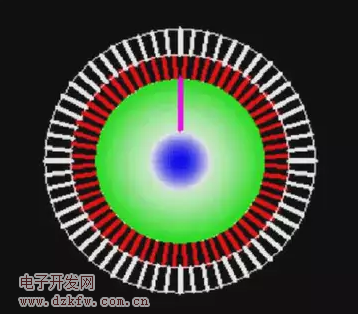
下图中是编码器的码盘,码盘通常由一块玻璃构成,在玻璃的表面上镀了一层金属铬,然后采用激光技术把这个玻璃盘刻成一个个明暗相间的条纹。从图中也可以看出,在这个码盘当中外围刻了一圈条纹,假设为编码器输出的A相脉冲,向内还有一圈条纹相当于编码器输出的B相脉冲,最里面一环只刻了一条条纹,这就是编码器输出的Z相脉冲。如果编码器的分辨率越高,那么码盘上刻的条纹就越多。Z相脉冲一般只有一个条纹,也就是说编码器旋转一周,Z相只输出一个脉冲。
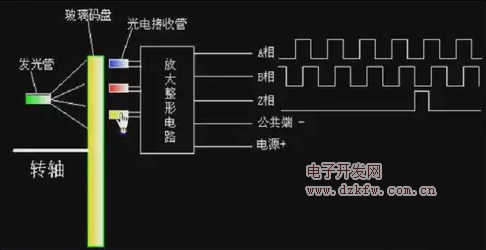
编码器的工作原理:如下图,发光管发光通过玻璃码盘的条纹由光电接收管接收,当电机旋转时码盘跟着转动,由于码盘上是一些明暗相间的条纹,所以光电接收管接收到的就是一些光脉冲,光电接收管把光信号转换成电信号,电信号再通过放大整形电路转换成我们需要的矩形脉冲。由于码盘上A相和B相所刻的条纹是相间隔的,因此放大整形电路输出的A相和B相脉冲存在一个相位差,这里我们要求A相和B相脉冲的相位差为90度。由于码盘上Z相只刻有一个条纹,所以电机旋转一周只产生一个Z相脉冲。我们这里所讲的编码器为相对式编码器,编码器除了相对式编码器还有一种为绝对式编码器,有些伺服电机也会采用绝对式编码器。
编码器的作用:在伺服电机上编码器是作为伺服系统的速度反馈和位置反馈的元件。
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底