
编码器(encoder)是将信号(如比特流)或数据进行编制、转换为可用以通讯、传输和存储的信号形式的设备。编码器把角位移或直线位移转换成电信号,前者称为码盘,后者称为码尺。按照读出方式编码器可以分为接触式和非接触式两种;按照工作原理编码器可分为增量式和绝对式两类。增量式编码器是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。绝对式编码器的每一个位置对应一个确定的数字码,因此它的示值只与测量的起始和终止位置有关,而与测量的中间过程无关。
encoder 编码器
编码器分类
按码盘的刻孔方式不同分类
增量型:就是每转过单位的角度就发出一个脉冲信号(也有发正余弦信号,然后对其进行细分,斩波出频率更高的脉冲),通常为 A 相、B 相、Z 相输出,A 相、B 相为相互延迟 1/4 周期的脉冲输出,根据延迟关系可以区别正反转,而且通过取 A 相、B 相的上升和下降沿可以进行 2 或 4 倍频;Z 相为单圈脉冲,即每圈发出一个脉冲。
绝对值型:就是对应一圈,每个基准的角度发出一个唯一与该角度对应二进制的数值,通过外部记圈器件可以进行多个位置的记录和测量。
按信号的输出类型分为:电压输出、集电极开路输出、推拉互补输出和长线驱动输出。
以编码器机械安装形式分类
有轴型:有轴型又可分为夹紧法兰型、同步法兰型和伺服安装型等。
轴套型:轴套型又可分为半空型、全空型和大口径型等。
以编码器工作原理可分为:光电式、磁电式和触点电刷式。
编码器组成部分
1.机械接口
机械接口包含所有允许编码器耦合到机器或应用设备的组件,包括:轴,连接在旋转的机器轴上,按照固定方式设计:实心或孔轴;法兰,将编码器固定并调整到其支架上的法兰;外壳,包含并保护磁盘和电子元件;
2.码轮(或磁性致动器或线性刻度)
编码器码轮(或盘)定义了脉冲的传输码;它由一个由塑料、玻璃或金属材料制成的支撑物组成,支撑物上刻有透明或不透明部分交替形成的图案。在线性尺度上,用静止不透明条代替这一图案。采用磁感测时,用磁路(南北)模式代替码轮或线性标度。
3.光电接收器(或磁传感器)
光电接收器时由一组传感器(光电二极管或光电晶体管)制成的,这些传感器由红外光源照亮。在接收器和 LED 之间由一个刻度码轮。光将磁盘像投射到接收器表面,接收器表面被一种称为刻线的光栅覆盖,具有相同的磁盘台阶接收器将发生的由圆盘移动引起的光变化转换成相应的电变化。
磁编码器系统是由带磁铁的旋转驱动器和磁传感器将磁场变化转化为电信号制成的。
4.电气接口
电子接口时编码器向接收器传输数据的方式。电信号(可以时数字的或模拟的)通过编码器电缆传输到一个智能设备,如接口板,PLC 等。
文章目录
1.什么是编码器
编码器本质是一种传感器,用来测量机械旋转或位移。编码器能够测量机械部件在运动时的位移位置或速度等信息,并将其转换成电信号。 编码器发送反馈信号,可用于确定位置,计数,速度或方向。
编码器可以根据不同的方式分出很多种类型。例如根据检测原理,可分为光学式、磁式、感应式和电容式;根据内部机械结构的运动方式,可分为线性编码器和旋转编码器;根据其刻度实现方法及信号输出形式,又可分为增量式、绝对式以及混合式三种;按照读出方式编码器可以分为接触式和非接触式两种。
2.增量式编码器和绝对式编码器
两种编码器总体结构上比较类似,都是由码盘、检测装置和放大整形电路构成,但是具体的码盘结构和输出信号含义不同。编码器可以产生增量或绝对信号,增量信号不表示特定位置,只表示位置已更改。
1)增量式编码器
增量式编码器是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。
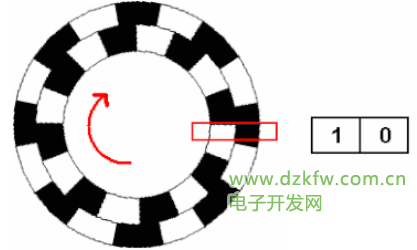
增量式编码器都有 A、B 两通道信号输出,这是因为增量式编码器的码盘上有错开一定角度的两圈线槽,这个角度会使得光电检测装置输出的两相信号相差 1/4 周期 (90°)。码盘的具体工作方式如下图所示。当码盘转动时,内圈和外圈的线槽会依次透过光线,光电检测装置检测到光线通断的变化,就会相应的输出脉冲信号,因为内外圈遮光和透光时候存在时间差,所以也就有了 A、B 两通道信号的相位差。
通过A、B相正交输出可以区分轮子的正反转,通过正交解码可以判断出电机在正转还是反转。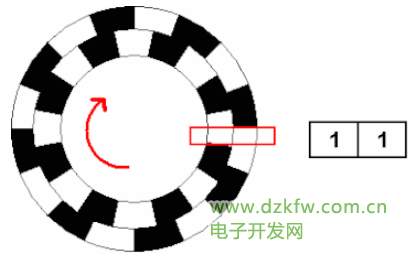

2)绝对式编码器
绝对式编码器的每一个位置对应一个确定的数字码,因此它的示值只与测量的起始和终止位置有关,而与测量的中间过程无关,在接收设备断电重启后绝对式编码器无需寻找参考零点。
一个绝对式编码器有 N 条码道,它就能输出 N 位二进制数。这些二进制数与转轴的机械位置是固定的,和编码器外部因素无关,所以叫做绝对式编码器。
绝对编码器每一个位置对应不同的码,这意味着绝对编码器既提供位置已改变的指示,也提供编码器绝对位置的指示。
下图是一个简化版的绝对式编码器码盘 
3)混合式绝对式编码器
混合式绝对式编码器,它输出两组信息:一组信息用于检测磁极位置,带有绝对信息功能;另一组则和增量式编码器的输出信息完全相同。
3.编码器基本参数

4.补充
同时有的编码器还有一个Z相信号,即编码器机械零位信号,每当编码器转到机械零位,Z相输出一个脉冲,可用于矫正脉冲长时间的积分误差。
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底