
运动控制器是一种电子设备,通常与运动控制软件配合使用,用于控制机器人、数控机床和其他自动化设备移动或执行各种任务。运动控制技术是数控机床的关键技术,其技术水平的高低将直接影响一个国家装备制造业的发展水平。目前,多轴伺服控制器越来越多地运用在运动控制系统中,具有较高的集成度和灵活性,可实时完成运动控制过程中复杂的逻辑处理和控制算法,能实现多轴高速高精度的伺服控制。
运动控制器的工作原理是将预定的控制方案、规划指令转变成期望的机械运动,实现机械运动精确的位置(点位、运动轨迹、插补等)控制、速度控制、加速度控制、转矩或力的控制。
广义的运动控制器按结构分类可分为PLC可编程逻辑控制器、单片机控制器、独立式运动控制器、基于PC机的运动控制卡、网络控制器等。运动控制板与plc的连接示例如下:
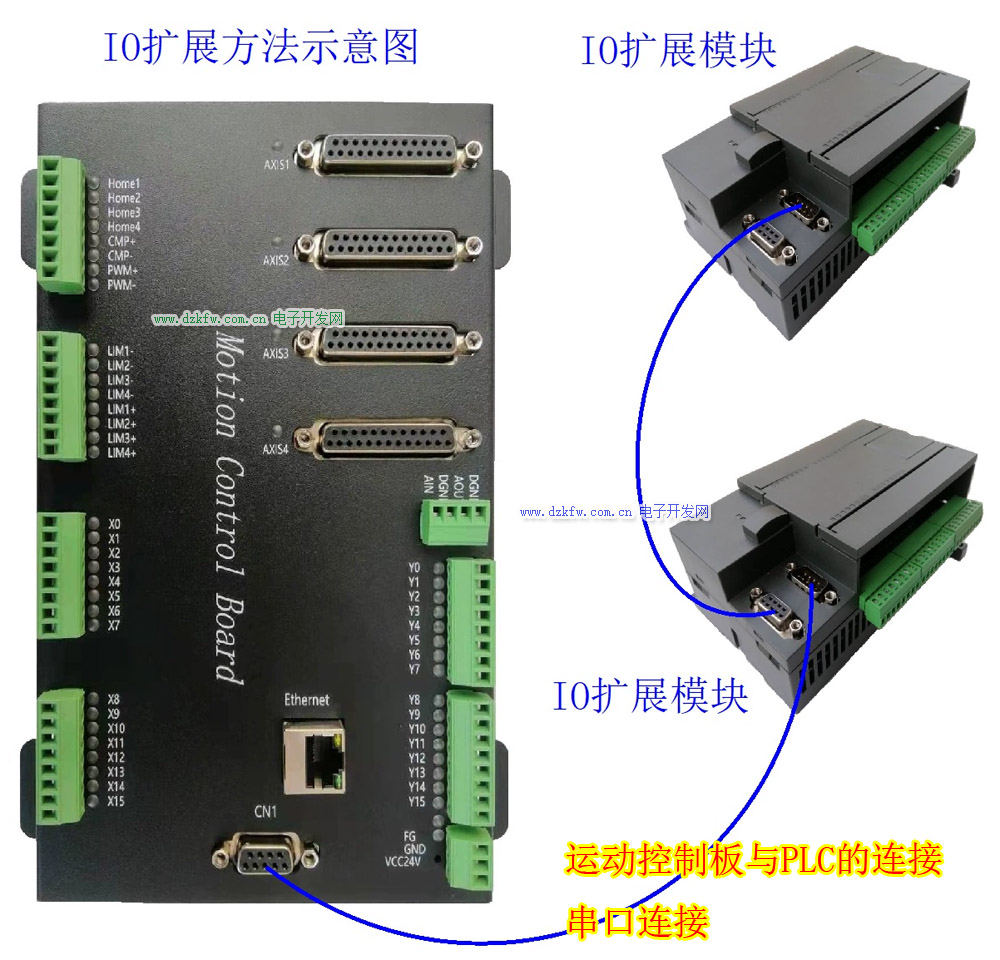
通过扩展以后,一个PC最多可以控制8、16、24、32......2000个轴、16、32、64、128、256......128000个输入、128000个输出,可满足所有轴数量场合!
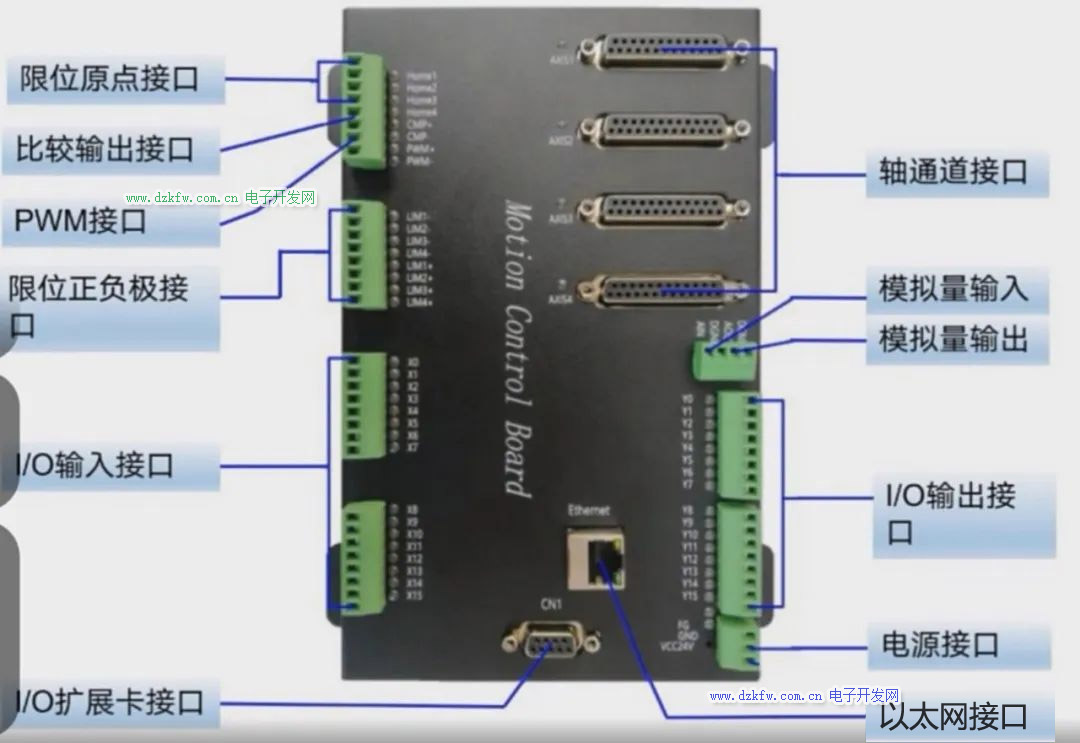
一、硬件资源
1、板卡采用24V 直流电源供电。
2、控制卡共有16 路通用输入,全部光耦隔离。
3、控制卡共有16 路通用输出,可直接驱动继电器控制外部IO负载,比如真空电磁阀、气缸.......等等
4、控制卡共有4路零位信号,全部光耦隔离。
5、控制卡共有路正限位信号,4路负限位信号,全部光耦隔离。
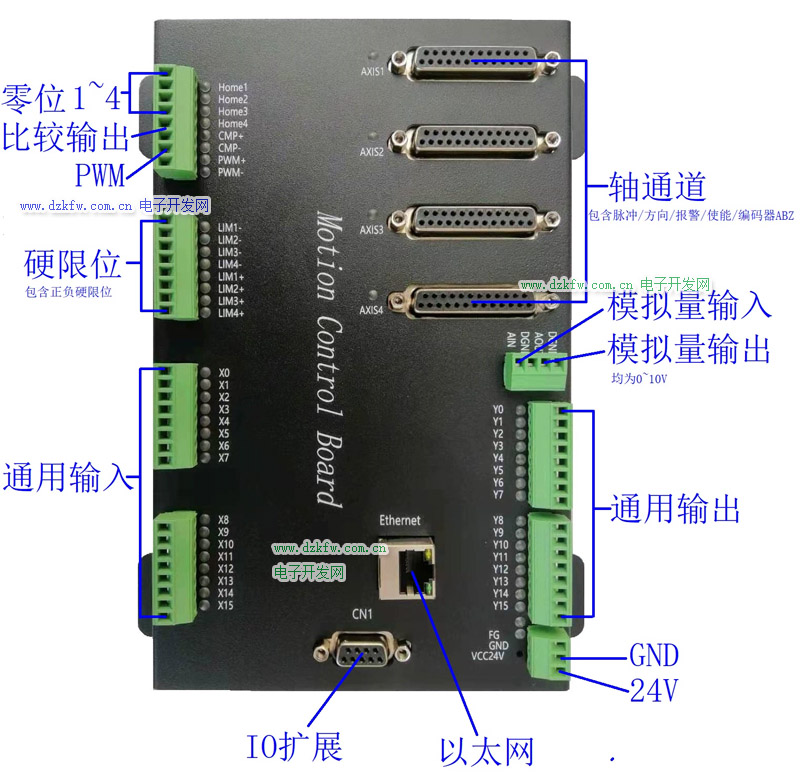
6、控制卡路轴通道,可控制步进电机、伺服电机。
7、控制卡每路轴通道都包含脉冲、方向、正交编码器、Z相索引、使能、报警、复位等信号接口。
8、控制卡每个轴通道脉冲输出最高频率达2MHz。
9、控制卡的每个轴通道都支持编码器反馈。
10、支持硬件捕获、电子齿轮/电子凸轮、比较输出、PWM
11、带模拟量版本的控制卡支持模拟量(1路DA和1路AD,0~10V)
不够用还有专用的模拟量扩展模块
二、软件资源
1、控制卡提供了VC ++、C#下的动态库,用户可利用动态库提供的API 完成板卡打开、关闭、IO 输入、IO
输出、步进/伺服电机速度控制、步进/伺服电机点位运动控制。
2、控制卡支持2轴、3轴直线插补,X/Y或者X/Z或者Y/Z任意平面圆弧插补。
3、控制卡支持连续小线段及圆弧轨迹运动,支持速度前瞻。
4、带模拟量版本的控制卡支持模拟量(1路DA和1路AD,0~10V)
不够用还有专用的模拟量扩展模块
5、支持PWM
6、支持比较输出功能(脉冲比较输出或者编码器比较输出)
7、支持高速硬件捕获
8、支持自动回零
9、带专用正负硬限位和专用零位信号
说明书下载链接: https://pan.baidu.com/s/1sHlxs2am0E53HWlI2TrlYw
光盘下载链接 : https://pan.baidu.com/s/1UrvHWhHm6QQ0yKdGqQEcgQ
运动控制器主要分为三类,分别是PC-based(工控计算机)、专用控制器、PLC。其中,PC-based 运动控制器是一种基于个人计算机的开放式运动控制系统,它具有灵活性和可扩展性,但需要较高的技术水平;专用控制器是一种针对特定应用场景而设计的专用控制器,它具有较高的可靠性和稳定性;PLC 运动控制器则是一种基于可编程逻辑门阵列(PLC)的通用型控制器,它具有较高的性价比和适用范围广的特点。
运动控制器和PLC都是自动化控制系统中的重要组成部分,你中有我,我中有你,但它们的应用场景和侧重功能有所不同。运动控制器主要用于控制步进电机、伺服电机等运动部件,而PLC则主要用于控制逻辑电路、人机界面等。 它们的区别如下:
控制对象不同:运动控制器主要控制运动部件,而PLC主要控制逻辑电路和人机界面。
控制方式不同:运动控制器通常采用脉冲输出或方向输出等方式进行控制,而PLC通常采用开关量输入和输出进行控制。
编程语言不同:运动控制器通常使用C或C++等高级语言进行编程,而PLC通常使用Ladder Diagram(梯形图)等低级语言进行编程。
在实际应用中,运动控制器和PLC可以结合使用,以实现更复杂的运动控制任务。例如,可以使用PLC作为主控制器,将运动控制器作为从控制器来实现更高级别的运动控制。
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底