
运动控制其本质是控制电机,实现其对角位移,转矩,转速等物理量。 运动自动化控制一般针对某个产品,由机械、软件、电气等模块组成,如精密数控机械、机床、机器人、无人机、运动平台等等。运动控制主要针对某个产品的个体控制,它可以是某个系统内的某个设备。
过程控制与运动控制在很多场合已经结合在一起共同控制大型生产线。
什么是自动化过程控制?
利用plc控制器收集传感器反馈的数据,并分析处理这些数据后,调节优化及控制各种设备,以提高生产的效率。其控制的对象一般是各类水泵、风机、电动阀门等。
过程自动化一般用于环保行业如污水、废气处理,节能行业,对工业生产中的各类负载设备进行智能调节以保证其运行于最佳状态,以达到节能的目的。
整个系统一般由plc控制柜、配电柜以及控制程序,各传类感器,组态软件,监控系统等组成。
过程控制主要用于传统工业自动化领域中,是一种大系统控制,控制对象比较多,如一条生产线。

▲某企业的自动化过程控制拓扑图
自动化过程控制和运动控制是不同的
从关注点来说,自动化过程控制(这儿指伺服电机)首要关注的是控制单个电机的转距、速度、方位中的一个或多个参数到达给定值。而运动控制首要关注点在于和谐多个电机,完结指定的运动(组成轨道、组成速度),比较着重轨道规划、速度规划、运动学转化;比方数控机床里面要和谐XYZ轴电机,完结插补动作。
自动化过程控制常常作为运动控制系统的一个环节(一般是电流环,作业在力矩方式下),更着重于对电机的控制,一般包括方位控制、速度控制、转矩控制三个控制环,一般没有规划的才能(有部分驱动器有简单的方位和速度规划才能)。

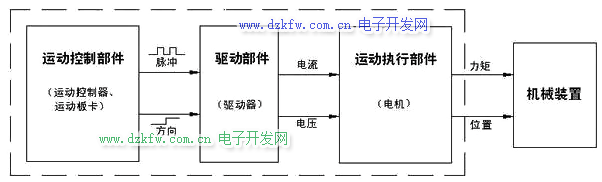
▲运动控制系统图
・ 运动控制器:常见的就是PLC
・ 驱动器:工控人对驱动器应该再熟悉不过了
・ 执行机构:伺服电机
・ 减速机构:减速器
・ 光栅:编码器的一种;(一般用于车床加工)
・ 人机界面:大家熟悉的触摸屏。
运动控制系统其本质是控制电机,实现其对角位移,转矩,转速等物理量。一般针对某个产品,由机械、软件、电气等模块组成,如精密数控机械、机床、机器人、无人机、运动平台等等。运动控制主要针对某个产品的个体控制,它可以是某个系统内的某个设备。
简单来说,就是由运动控制器发出命令,给驱动机构进行功率放大,将放大后的信号传给执行机构(伺服电机),伺服电机自带编码器,能够实现半闭环控制;伺服电机用传动机构控制机械,在机械装置上安装了光栅尺(也是编码器),实现全闭环控制。操作人员在现场可通过人机界面去进行整个环节的调试操作。
运动控制起源于早期的伺服控制。简单地说,运动控制就是对机械运动部件的位置、速度等进行实时的控制管理,使其按照预期的运动轨迹和规定的运动参数进行运动。
早期的运动控制技术主要是伴随着数控技术、机器人技术和工厂自动化技术的发展而发展的。早期的运动控制器实际上是可以独立运行的专用的控制器,往往无需另外的处理器和操作系统支持,可以独立完成运动控制功能、工艺技术要求的其他功能和人机交互功能。
这类控制器可以成为独立运行的运动控制器。这类控制器主要针对专门的数控机械和其他自动化设备而设计,往往已根据应用行业的工艺要求设计了相关的功能,用户只需要按照其协议要求编写应用加工代码文件,利用RS232或者DNC方式传输到控制器,控制器即可完成相关的动作。这类控制器往往不能离开其特定的工艺要求而跨行业应用,控制器的开放性仅仅依赖于控制器的加工代码协议,用户不能根据应用要求而重组自己的运动控制系统。
一个运动控制系统的根本架构组成包括
一个运动控制系统,通常由驱动器、控制器、传感器三部分组成。
1、控制器:
1)PLC
PLC主要功能是对开关量进行逻辑控制,并有简单的运动控制(直线轨迹控制)、运算数据处理等功能,通常采用触摸屏作人机界面。为扩充其应用领域,各厂家为客户提供了各种选配功能模块,如多轴运动控制模块、网络通信模块、模拟信号与数字信号转换模块等。PLC具有工作可靠、编程简单等优点,但其运动控制功能相对简单,若选用多轴运动控制模块,则价格较高。
2)独立式运动控制器
独立式运动控制器配有显示屏、按键和功能完善的控制指令,并有各种通信接口,控制电动机运动的能力比PLC强大。可完成直线插补、圆弧插补、轨迹控制等功能,且编程简单。目前,国外的运动控制器都具有现场总线控制功能。
3)PCI总线型运动控制卡
由于PC机运算速度快、存储量大,而且Windows操作系统的软件资源丰富,采用VB、VC等软件编写用户程序,功能十分强大。很多自动化设备都离不开PC机,特别是采用机器视觉检测的自动化设备、需要运行AuoCAD等大型软件的设备和需要采集存储生产数据的设备等,因此,这些设备采用基于PC机的PCI总线型运动控制卡与PC机一起组成运动控制器。在所有的运动控制器中,运动控制卡的功能最强,但其工作的稳定性可靠性较差。
4)专用运动控制器
专用运动控制器是针对特定的设备专门设计的运动控制器,如绣花机控制器、缝纫机控制器喷绘机控制器等。专用运动控制器通常以单片机、ARM等芯片为核心设计,其集成度高、价格便宜、使用方便,软件是为专用设备特殊设计的,客户可直接使用。其硬件、软件的设计都充分考虑了专用设备的工艺要求。
相对于专用运动控制器而言,PLC、独立式运动控制器、运动控制卡被称为通用运动控制器。
2、驱动器:
作为运动控制中的执行部件一般有电动式、 液压式及气动式三类。
电动式执行部件动作灵敏,性能优良,控制方便,且容易小型化,已经得到广泛的应用。运动控制中最常用的伺服电机类型有:直流(DC)伺服电机、无刷直流伺服电机、交流(AC)伺服电机和步进电机。按执行电机功率的不同,伺服电机可分为:小功率随动系统(100W以下)、中功率随动系统(100~ -500 W)和大功率随动系统(500W以上)。
每种电机都有相应的特点和驱动方式,详见裕如:机器人常用电机介绍。
3、传感器:
编码器、力传感器、压力传感器等。
如何选择运动控制器?
1、根据要开发设备的工作特点,确定伺服电机的类型;
2、确定要控制的电机轴数和电机工作模式;
3、确定位置检测、反馈模式,选择是否采用光电编码器或光栅尺或磁栅尺;
4、确定输入输出开关量的数量;
5、根据以上内容,选择合适的运动控制器。
运动控制卡 知名品牌
国内:1.固高
2.雷赛
3.正运动
4.众为兴
5.研华
6.乐创
7.东莞博派智能科技
国外
1.PMAC(欧姆龙收购)
2.翠欧 (英国)
3.Aerotech (美国)
4.以色列ACS公司
5.美国ParkerHannifin公司
6.美国GALIL公司
7.美国科尔摩根(Kollmorgen)公司
8.瑞士瑞诺集团
9.美国Baldor公司
10.美国AEROTECH公司
11.美国国家仪器公司NI
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底