
气缸驱动系统自20世纪70年代以来就在工业化领域得到了迅速普及. 气缸适用于作往复直线运动,尤其适用于工件直线搬运的场合.

电缸和气缸在多个方面存在显著差异,主要包括驱动方式、精度、速度、驱动力、应用领域以及环保性和安全性等。
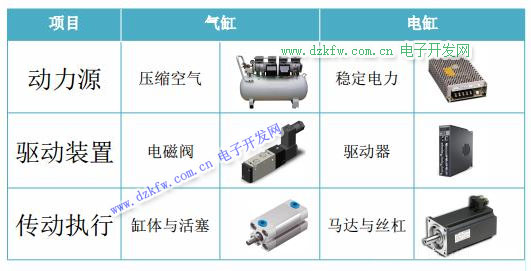
驱动方式和驱动力
- 气缸:基于压缩空气驱动,当压缩空气进入气缸内部时,推动活塞进行直线运动,从而实现驱动功能。气缸的驱动力相对较小。
- 电缸:通过电动机驱动,电动机将电能转化为机械能,驱动活塞或丝杠完成直线运动。电缸的驱动力更为强劲。
精度和速度
- 精度:电缸由于采用电气控制,能够实现高精度的位置控制,精度通常可以达到0.01mm甚至更高。气缸受限于气体的可压缩性和气缸本身的制造精度,精度相对较低,一般在1mm左右。
- 速度:气缸的驱动速度较快,但在速度调节范围上相对较窄。电缸的速度可调范围较宽,但最大速度相对较慢。
应用领域
- 气缸:广泛应用于需要高频率重复性动作的场合,如包装、输送等生产线。由于其结构简单且成本较低,易于维护。
- 电缸:主要应用于需要强大驱动力和高精度定位的场合,如数控机床、机器人以及自动化设备等。电缸在工业生产中发挥着至关重要的作用。
环保性和安全性
- 环保性:电动缸无污染,环保性好;而液压缸和气缸操作相对复杂,且可能存在漏油和噪音污染。
- 安全性:电动缸安全性高,几乎无隐患;液压缸和气缸可能存在泄漏油或气的安全隐患
气缸种类很多,比如无杆磁偶气缸,就是一根不锈钢气缸套里面是个强磁活塞,活塞上有密封圈,没有气缸推杆,缸套外也是一组强磁铁套,里外相互吸,形成里外同步运动。就叫磁偶无杆气缸,这种气缸的优点是,行程大。速度快,缺点是磁性力有限,不好做成大推拉力的无杆气缸。制造成本高。
普通气缸好处是经济实用而且常用。成本低,技术成熟。推力大,大型气缸能达到好几十吨,缺点是伸缩杆不能受大的侧向力,配合导轨使用。气缸都是电磁阀或气动控制阀来控制伸缩动作,由于高压空气的不稳定性,气缸难以精密控制,对于普通要求不高的场合实用,气缸在工作时是耗高压空气的,所以空压机种较耗能的设备,空压机不停的工作来保证气压的稳定。气缸也会因负荷大小影响气缸工作速度和稳定性。一般气缸行程调节用限位块,减速时要加缓冲器,减少冲击力,所以气缸这套组装下来结构也算有点复杂。再者气动密封是很关键的部分,密封圈容易老化磨损。使用寿命因环境和使用频率而定。
我在说说电缸,这是最近几年的产物,是根据机床常用的滚珠丝杠滑台的原理借鉴而生的产品。电缸好处是控制精密度高。但造价高昂,高要求的环境使用较好,控制器复杂,有伺服驱动,步进马达驱动等等,可以用程序控制电缸的动作及行程。不用限位缓冲什么的了。动作形成完全有控制器来控制。
现在很多注塑机都是用伺服电缸驱动,节约能源,推力大,大功率的能达到上百吨的顶出力。所以电缸也是未来的一种趋势,目前电缸成较高,一台几千到上几十万。行程不能做太长
基本内容
一、电缸简介
伺服电机与丝杠一体化设计的模块化产品
电缸是将伺服电机与丝杠一体化设计的模块化产品,将伺服电机的旋转运动转换成直线运动,同时将伺服电机最佳优点-精确转速控制,精确转数控制,精确扭矩控制转变成-精确速度控制,精确位置控制,精确推力控制;实现高精度直线运动系列的全新革命性产品。
二、电缸气缸比较
电缸和气缸是两种常见的工业自动化设备,主要区别在于它们的动力来源不同,电缸使用电动机,而气缸使用气压机。相比气缸,电缸的优点在于运动精度高、速度快、能耗低等方面,同时也有更广泛的应用场景。
三、电缸的优势
所谓电缸(也称为电动缸),就是各种以电力作为直接动力源,具有像气缸类似的运动特征的一种执行元件。

通常采用马达(如伺服马达、步进马达、直流马达)带动各种螺杆(如T型螺杆、滚珠螺杆)或同步轮旋转,通过螺母或皮带转化为直线运动,并推动负载运动。
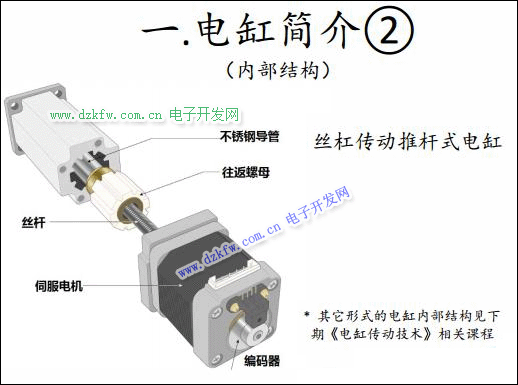
丝杠传动推杆式电缸
电缸分为;
1旋转式电缸.
2 推杆式电缸
3 滑台式电缸
其中滑台式电缸应用最为广泛,能占全部电缸的60%以上.
电缸系统基本结构
1.电源(DC24,DC48,AC220)
2.控制器(PLC,数控,开关)
3.驱动器(伺服,步进,无刷)
4.电缸本体(丝杠,皮带,齿轮)
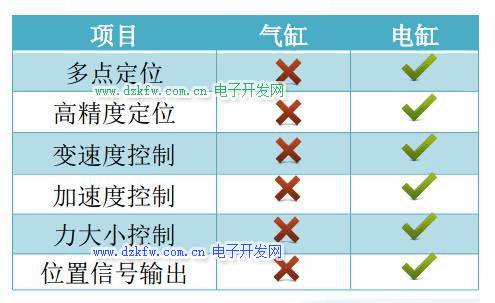
二.气缸电缸比较
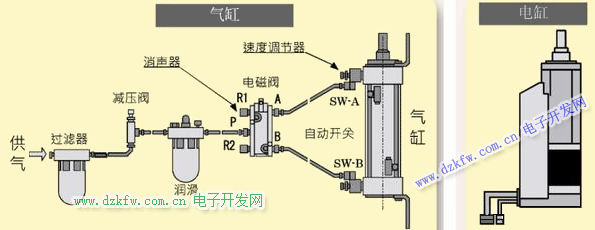
驱动控制比较;
电缸的优势
电动缸的优点有如下几点:
1.电动缸在复杂的环境下工作只需要定期的注脂润滑,并无易损件需要维护更换,将比液压系统和气压系统减少了大量的售后服务成本。
2.可以提供非常灵活的安装配置,全系列的安装组件,可以与伺服电机直线安装,或者平行安装,配置灵活。
3.电动缸可以完全替代液压缸和气缸,并且实现环境更环保,更节能,更干净的优点,很容易与PLC等控制系统连接,实现高精密运动控制。
4.很容易与PLC等控制系统连接,实现高精密运动控制。噪音低,节能,干净,高刚性,抗冲击力,超长寿命,操作维护简单。
5,不需要缓冲器和阻挡块,大大地提高了使用寿命.
5.长期工作,并且实现高强度,高速度,高精度定位,运动平稳,低噪音。
广泛的应用在造纸行业,化工行业,汽车行业,电子行业,机械自动化行业,焊接行业等。
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底