

ЛњаЕЪжФЃаЭ
вЛЁЂЛњаЕЪжИїВПЮЛНсЙЙ

ЛњаЕЪжИїВПЮЛНсЙЙ
1. АкЖЏЦјИз 2. ЖЈЮЛТнЫЈ 3. ЦјЖЏЪжзІ 4ЁЂ6ЁЂ9. ДХадПЊЙи 5. БъзМЦјИз 7. НкСїЗЇ 8. ЫЋСЊЦјИз10. НгНќПЊЙи 11. ЛКГхЗЇ 12. жЇМм
ЛњаЕЪжгЩЖрИіСЌИЫКЭЙиНкзщГЩЁЃЛњаЕЪжвЛАугЩЕззљЁЂжДааЛњЙЙЃЌШчМаЧЏЁЂЮќХЬЕШЃЌвдМАЫќУЧжЎМфЕФЙиНкКЭСЌИЫзщГЩЃЌЛњаЕЪжФмЙЛдкЦфЛюЖЏЗЖЮЇФкЃЌЪЕЯжШЮвтдЫЖЏКЭзЊЯђЃЌЮвУЧвЛАуАбЛюЖЏЕФЙиНкГЦЮЊздгЩЖШЁЃ
ЖўЁЂЦјТЗдЊМў

ЦјТЗдЊМўжжРр
ЦјЖЏЛњаЕЪжЩцМАЕНЕФЦјТЗдЊМўжївЊгаАкЖЏЦјИзЁЂЫЋСЊЦјИзЁЂБЪаЭЦјИзКЭЦјдДДІРэзщМўЕШЁЃ
ЦјдДДІРэзщМў

ЦјдДДІРэзщМў
ЦјдДДІРэзщМўгЩбЙСІЕїНкЙ§ТЫЦїЁЂНјЦјПЊЙивдМАЭфЭЗЙЙГЩЁЃЦфЦјдДгЩПеЦјбЙЫѕЛњЬсЙЉЃЌбЙСІЗЖЮЇдк0.6ЁЋ1.0MPa,жЎМфЃЌЪфГібЙСІЪЧ0ЁЋ0.8MPaЃЌПЩвдЕїНкЁЃЪфГіЕФбЙЫѕПеЦјЫЭЕНИїЙЄзїЕЅдЊЁЃ
БЪаЭЦјИз

БЪаЭЦјИз
ЭЈЙ§ЦјИзЭљИДдЫЖЏАбЮяСЯБЛЫЭЕНЯргІЮЛжУЁЃШчЙћНјГіЦјЕФЗНЯђБфЛЏЃЌЦјИзЕФдЫЖЏЗНЯђвВЛсЫцжЎБфЛЏЁЃЦјИзСНВрЕФДХадПЊЙижївЊгУРДИњзйЦјИзЪЧЗёвбОдЫЖЏЕНжИЖЈЮЛжУЁЃ
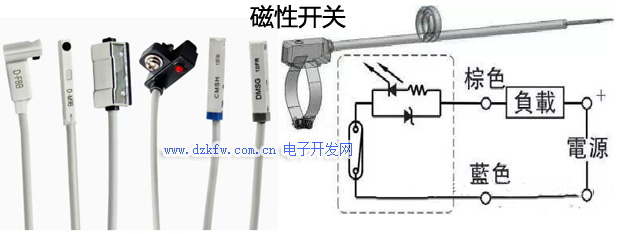
ЫЋЯпШІЕчДХЗЇ
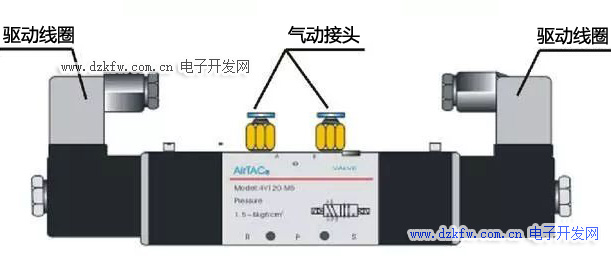
ЫЋЯпШІЕчДХЗЇ
ЫЋЯпШІЕчДХЗЇжївЊЪЧПижЦЦјИзНјЁЂГіЦјЃЌЪЕЯжЦјИзЕФЩьЫѕдЫЖЏЁЃвЊзЂвтКьЩЋжИЪОЗжЕЦе§ИКМЋЃЌШчЙће§ИКМЋНгЗДЃЌвВПЩвдЙЄзїЃЌЕЋЪЧжИЪОДІгкЙиБезДЬЌЁЃ
ЕЅЯпШІЕчДХЗЇ

ЕЅЯпШІЕчДХЗЇ
ЕЅЯпШІЕчДХЗЇПижЦЦјИзЕФЕЅЗНЯђдЫЖЏЃЌЪЕЯжЩьЫѕдЫЖЏЁЃгыЫЋЯпШІЕчДХЗЇЕФВЛЭЌдкгкЃЌЫЋЯпШІЕчДХЗЇГѕЪМЮЛжУВЛЙЬЖЈЃЌФмЙЛШЮвтПижЦСНИіЮЛжУЃЌЖјЕЅЯпШІЕчДХЗЇГѕЪМЮЛжУЪЧЙЬЖЈЕФжЛПЩвдПижЦЦфжавЛИіЗНЯђЁЃ
ЦјЖЏдЊМўЖЏзїЗжЮі
ЪжзІПижЦЪОвтЭМ
Ш§ЁЂжївЊДЋИаЦї
ЛњаЕЪжЭЈЙ§ИажЊЦїЕФФкВПДЋИаЦїМьВтБОЩэЕФзДЬЌЃЌШчЫйЖШЁЂЮЛжУЁЂМгЫйЖШЕШЃЌНјЖјРДЪЕЯжБОЩэгыЛЗОГаХЯЂЃЌШчОрРыЁЂЮТЖШКЭбЙСІЕФЯрЛЅзїгУЃЌЛЗОГаХЯЂЭЈЙ§ЭтВПДЋИаЦїНјааМьВтЁЃЯТвЛВНЃЌЭЈЙ§ПижЦЦїбЁдёЖдгІЕФЛЗОГФЃЪНжИЛгЛњаЕЪжЭъГЩШЮЮёЁЃ
ЛњаЕЪжФкВПгУЕНЕФДЋИаЦїжївЊгавдЯТМИжжЃК
1ЁЂЙтЕчДЋИаЦї
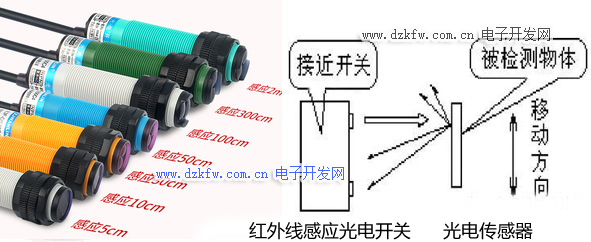
ЙтЕчДЋИаЦї
дРэЃКЗЂЩфЦїЗЂГіЕФМьВтЙтееЩфЕНБЛВтЮяЬхЩЯКѓЗЂЩњТўЗЂЩфЃЌНгЪеЦїдкНгЪеЕНзуЙЛЧПЕФЗДЩфЙтжЎКѓЃЌЙтЕчПЊЙиПЊЪМЖЏзїЁЃ
2ЁЂЕчИаЪННгНќПЊЙи
ЕчИаЪННгНќПЊЙи
дРэЃКЕчИаЪННгНќПЊЙиРяУцгаеёЕДЦїЃЌПЩвдВњЩњНЛБфДХГЁЃЌЕБИагІОрРыДяЕНФГИіЗЖЮЇЃЌН№ЪєФПБъФкНЋЛсВњЩњЮаСїЃЌДгЖјЪЙЕУеёЕДЧПЖШМѕШѕЁЃеёЕДЦїеёЕДМАЭЃеёЕФБфЛЏЃЌгЩКѓУцЕФЗХДѓЕчТЗНјааДІРэЃЌзюжезЊЛЛЮЊПЊЙиаХКХЁЃ
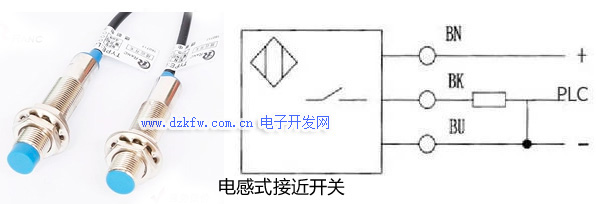
3ЁЂЦјИзЛюШћЕНЮЛМьВт----ДХадПЊЙи
ДХадПЊЙи
дРэЃКДјгаДХЛЗЕФЦјИзЛюШћдЫЖЏЕНжИЖЈЮЛжУКѓЃЌДХадПЊЙиФкЕФСНИіН№ЪєЦЌдкДХГЁЕФзїгУЯТБеКЯЃЌДЅЗЂаХКХВњЩњЁЃ
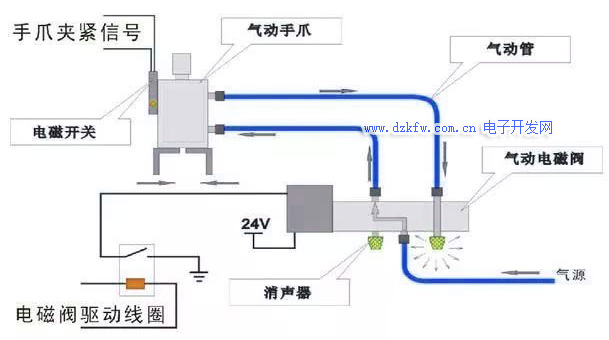
ЫФЁЂЦјЖЏЛњаЕЪжЕФЙЄзїдРэ
ЙЄзїдРэ
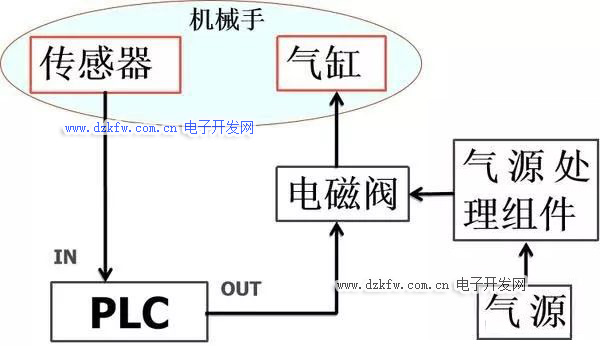
ЦјЖЏЛњаЕЪжжївЊгЩПижЦЯЕЭГжДЁЂЧ§ЖЏЯЕЭГЁЂжДааЛњЙЙКЭЮЛжУМьВтЯЕЭГЙЙГЩЁЃдкPLCГЬађЕФПижЦЯТЃЌЭЈЙ§ЦјбЙДЋЖЏЃЌЪЕЯжжДааЛњЙЙЖЏзїЁЃ
ПижЦЯЕЭГЕФаХЯЂНЋжИСюДЋИјжДааЛњЙЙЃЌЖдЛњаЕЪжЖЏзїНјааИњзйЃЌШчЙћЖЏзїЗЂЩњДэЮѓЛђепЙЪеЯЃЌЛсСЂМДБЈОЏЁЃ
РћгУЮЛжУМьВтзАжУНЋжДааЛњЙЙЕФЪЕМЪЮЛжУДЋЕнИјИјПижЦЯЕЭГЃЌзюжеНЋжДааЛњЙЙвдвЛЖЈЕФОЋЖШдЫЖЏЕНжИЖЈЮЛжУЁЃ
 ЗЕЛиЖЅВП
ЗЕЛиЖЅВП ЫЂаТвГУц
ЫЂаТвГУц ЯТЕНвГЕз
ЯТЕНвГЕз