
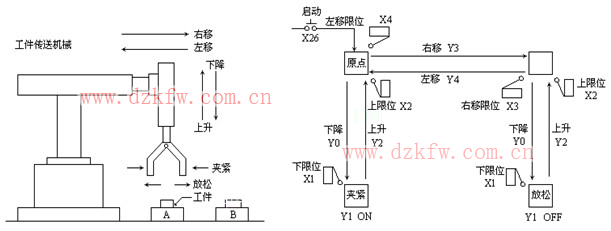
机械手将工件从A点向B点传送。机械手的上升、下降与左移、右移都是由双线圈两位电磁阀驱动气缸来实现的。抓手对工件的松夹是由一个单线圈两位电磁阀驱动气缸完成,只有在电磁阀通电时抓手才能夹紧。该机械手工作原点在左上方,按下降、夹紧、上升、右移、下降、松开、上升、左移的顺序依次运动。它有手动、单步、一个周期和连续工作(自动)四种操作方式。
简易机械手的操作面板如图3所示。
手动方式:是指用各自的按钮使各个负载单独接通或断开。
回原点:按下此按钮,机械手自动回到原点。
单步运行:按动一次启动按钮,前进一个工步。
单周期运行(半自动):在原点位置按动启动按钮,自动运行一遍后回到原点停止。若在中途按动停止按钮,则停止运行;再按启动按钮,从断点处继续运行,回到原点处自动停止。
连续运行(全自动):在原点位置按动启动按钮,连续反复运行。若在中途按动停止按钮,运行到原点后停止。
面板上的启动和急停按钮与plc运行程序无关。这两个按钮是用来接通和断开PLC外部负载的电源。
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底