

1、绪论
这篇文章是机械臂专栏的第一期,该文章旨在对机械臂基础知识进行简要的概述,为之后机械臂的运动学和动力学仿真做好铺垫。该篇文章只进行整体的知识架构梳理和具体知识的简要介绍,并不会过多深入,其中内容主要来源与John J. Craig 的著名著作《机器人学导论》,请需要学习机械臂的同学无比熟读该书。
首先介绍一下我将要介绍的主要知识点,空间描述与转换、机械臂运动学、机械臂速度与静力。
为什么要学习空间描述与转换呢,我们可以看下图,机械臂是若干个杆连接而形成的(连接两个杆的地方是关节),而在机械臂中这些杆称为连杆,每个连杆可以在夫连杆(上一连杆)的基础上绕某一轴旋转,(关节通过电机旋转带动连杆旋转),而这个轴只与夫连杆相对禁止,这就导致一旦多个连杆都进行运动时,连杆只能与“上一级连杆”和“下一级连杆”进行直接的空间转换关系,也就是说当我知道第一个连杆旋转的角度时,我就能根据底座的空间坐标推算出第一个连杆的具体位置,然后一级一级往后推就能获得最末端机械臂的位置,也就是接卸比末端位置。而空间描述和转换就是学习如何一级一级计算空间坐标,也就是学习从固定的底座开始,空间时如何通过连杆旋转一步一步转换的。

机械臂运动学就很好理解了,面对机械臂,我们肯定是研究如何使得机械臂按照我们意愿去运动,如何控制机械臂末端的位置。比如用机械臂拿杯子,肯先要控制末端到达杯子位置,所以这里就设计到运动学知识,分为正运动学和逆运动学,正运动学就是已知每个关节电机的旋转角度,推算出末端工具的空间位姿(这里的位姿其实就是空间位置加上空间朝向)。逆运动学就是已知我末端空间位置,推算出各个关节的角度,这就类似于拿杯子,我知道杯子位置,需要推算出末端工具到达该位置需要每个关节旋转多大角度。
机械臂速度与静力,就涉及到动力学知识,首先学习机械臂速度,是为了描述每个连杆线速度和角速度是如何传递的,其中比较主要的知识点就是雅可比矩阵,该矩阵描述了每个关节速度与末端的位姿速度。而机械臂静力就涉及到机械臂动力学知识,主要讲的是机械臂在某个姿态各关节以速度、加速度运动时,关节电机需要输出的力矩,如果末端对外界施加力,这里还需要加入施加力反作用在各个关节的力矩。
2、空间位置、姿态与位姿的描述
2.1,位置表示
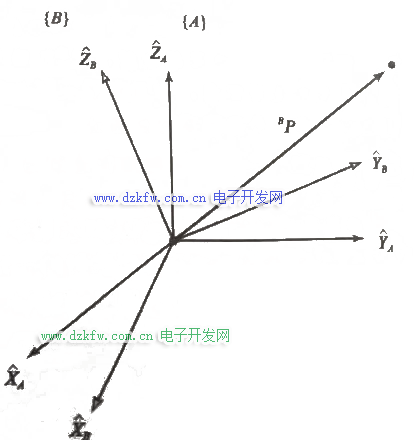
当我们对机械臂建立坐标系时,往往将底座作为基准坐标系,图中坐标系A便是基准坐标系,就能用一个3\times1的位置矢量给出坐标系中的任何点定位。还要注意矢量定义在哪一个坐标系。^AP是指相对坐标系A的一个点的位置。
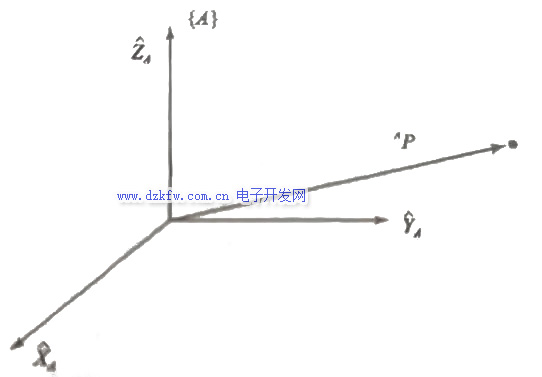
世界坐标系中的任何点都可以用一个3×1的位置矢量进行定位,例如:

2.2、位姿表示
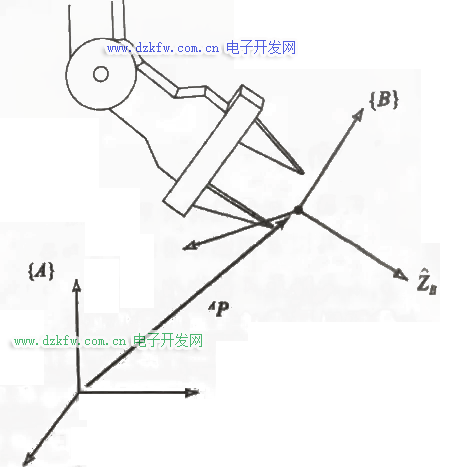
不仅需要表示空间中的点的位位置,还需要描述物体的姿态,也就是该点出物体的方向。上图确定了操作臂末端位置,若姿态也确定,末端的位姿就能完全被确定下来。为了描述物体的姿态,我们在物体上固定一个坐标系并且给出此坐标系相对于参考坐标系的描述。如下图的参考系B即为固定在物体上的。
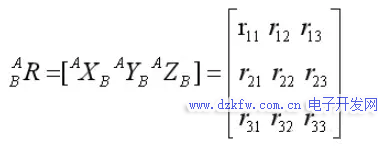
用XB,YB,ZB来表示坐标系{B}各主轴方向的单位矢量,当用坐标系{A}来表示时,它们被写成AXB,AYB,AZB,将三个单位矢量按AXB,AYB,AZB顺序排列组成一个3×3的矩阵,称之为旋转矩阵,用符号ABR来表示。
有了位姿的描述,我们就能知道一个连杆末端也就是关节相对于上一关节的位姿,依次描述最后就能获得末端位姿。如图所示,红色表示连杆,白色表示关节处,每个关节处就代表一个坐标系,通过坐标系的递推计算,就能算出末端坐标系相对基准坐标系的位姿。

接下来就时如何计算坐标系的位姿。
2.3 坐标系平移
可以从图中看出,B坐标系就是相对A坐标系进行平移
此时,我们用矢量相加的办法求点P相对于A的表示^AP:
2.4 坐标系旋转
若我们已知矢量相对于B的定义^BP,现在想求矢量相对于A的定义,且两个坐标系原点重合,我们已知^A_BR,那么我们是可以求解的。
该式可简化为旋转矩阵形式表示:
有了矩坐标系的偏移和旋转,我们就可以根据基准坐标系推算出连接连杆的坐标系。

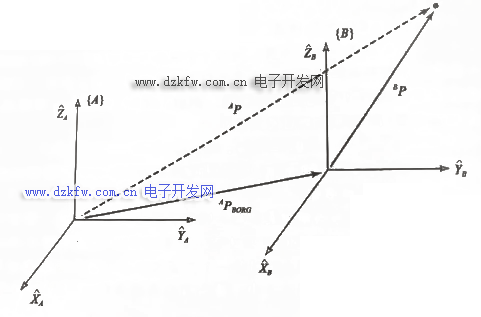
如图所示为两个坐标系有相对的偏移和旋转,于是就有:
而这样表示两个坐标系的关系就显得很麻烦,于是通过定义转换算子来方便描述:

于是我们就可以通过转换算子来描述两个坐标系的关系,同样转换算子是可以叠加的,通过不断的叠加就可以算出末端与基准坐标系的转换算子,也就是得到末端相对于基准坐标系的位姿。

3 、机械臂运动学
3.1、连杆表示
首先学习机械臂运动学,就需要了解机械臂的结构,连杆与连杆之间的坐标系是如何变换的,是如何平移,如何旋转,使得某一连杆坐标系按照这个平移旋转之后能够获得下一个连杆的坐标系,也即是两个连杆之间的坐标系算子与连杆结构的关系,更直白的意思就是,如果知道某一关节的角度,就能找到关节连接的两个连杆坐标系对于的变换算子T。
常见的操作臂的结构一般优先选择只有一个自由度的关节作为连杆的连接方式,大部分的操作臂中会包括转动关节和移动关节。只有很少见的情况,会使用具有n个自由度的关节,这种关节也可以抽象的看做用n个单自由度的关节与n-1个长度的连杆组合而成的。
我们在讨论操作臂时,会从固定基座开始为连杆编号,我们习惯性地成固定基座为连杆0,接下来的第一个能动的连杆被称为连杆1,以此类推,最末端的的连杆就称为连杆n

上图就是一种连杆描述方式,用四个参数描述两个连杆的相对位姿关系:
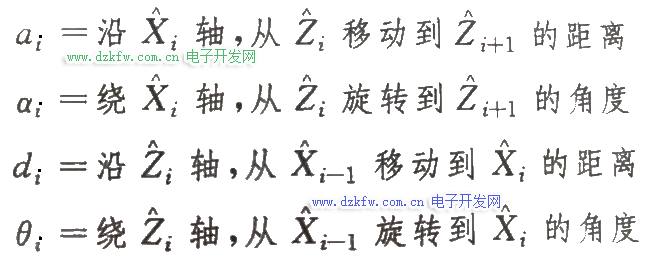
也就是如上分析,知道两个连杆的具体相对位姿关系后,就能推算出两个连杆坐标系的转换算子T:
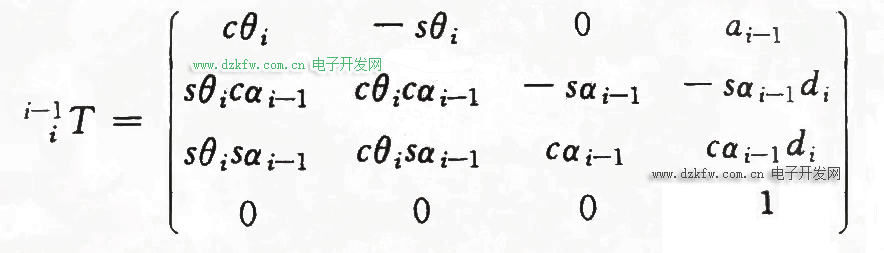
这样,只要我知道每个连杆相对关系,就能推算出机械臂末端相对基准坐标的转换算子,也就是能够得到末端相对基准坐标系的位置和状态。
3.2、运动学原理
在这个连杆关系中,有一个参数θ,他是动态变化的,就是其他三个参数是不会变化,而该参数θ就是关节旋转角度,所以我们就能根据每个关节旋转角度推算出机械臂末端相对基准坐标系的变换算子,从而得到机械臂末端的位姿,这就是正运动学。
当我们知道末端位姿时,希望机械臂能达到该位置,就首先推算处该变换算子关于θ的公式:

然后有已知的基准坐标系位姿和末端位姿进行矩阵运算的具体参数 T,然后进行方程求解,但是逆运动学的求解难度会随着机械臂关节数量的变换成几何倍增。
大概的运动学知识点就讲解到这里,有关动力学知识会在之后动力学仿真部分讲解,而接下来将会发布运动学的各种仿真方法。


 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底