
机械臂控制实验
实验一 机械臂控制实验
一、实验目的
1.了解机械臂的组成及性能指标;
2.了解机械臂的机械系统和控制系统的组成、工作原理;
3.了解机械臂完成搬运装配作业的过程,掌握机械臂示教作业的方法。
二、实验设备
四自由度机械臂及控制柜,计算机,气泵,装配轴、套。
三、实验原理
本实验使用的四自由度示教再现式机械臂采用串联平面式开链结构。机械臂各关节采用伺服电机和步进电机混合驱动,并通过Windows 环境下的软件编程和运动控制卡实现对机械臂的控制,使机械臂能够在运动范围内任意位置精确定位。
机械臂的示教、再现是示教再现型机械臂实现机械臂作业的两个过程。在示教过程中,操作者通过示教盒或计算机屏幕上的示教界面操作机械臂运动,计算机系统内安装的示教软件将机械臂运动轨迹各段的起点和终点、运动类型、运动速度等信息自动地记录在计算机存储器中;在再现过程中,重放存储器中存储的各段轨迹的运动类型和运动速度,并通过插补算法计算出各段轨迹的起点和终点中间的各个位置点,作为电机伺服系统的指令,从而再现示教过的作业程序。如需更改作业程序时,则需重新完成示教和再现的操作。
机械臂按运动轨迹控制方式可分为点到点(PTP)运动控制和连续轨迹(CP)运动控制。
四、实验内容
1.机械臂的机械系统认识
本机械臂具有4个自由度,即腰关节(关节1)、臂关节(关节2)、肘关节(关节3)、腕关节(关节4)各自的回转运动。
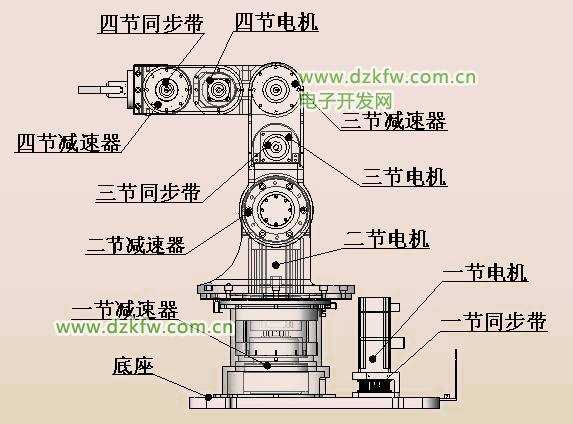
图1-1 机械臂的传动简图
机械臂的夹持功能是通过安装在手腕前端的手爪来完成的。本机械臂采用气动手爪机构来完成抓取作业,手爪的标称负载为2kg。机械臂的气动夹持装置由气泵、油水分离器、控制阀、手爪及气管五部分组成。
2.机械臂的控制系统认识
本机械臂的电控系统主要由计算机系统、电机及电机驱动器、传感器、电源、操作电路、控制柜等部分组成。
3.机械臂搬运装配实验
机械臂的搬运装配分成示教、再现两个过程。机械臂的示教窗口包含关节信息、末端坐标信息、示教盒、机械臂状态信息、示教点信息列表、示教速度控制和示教控制等部分。
五、实验步骤
1.介绍机械臂的性能指标及机械系统的各组成部分(教师演示);
2.介绍机械臂的电控系统各组成部分(教师演示);
3.机械臂搬运装配实验
1)连接好控制柜电源,开启计算机后,旋转控制柜上钥匙以开启电源开关,等待控制柜的报警指示灯变灰后,按下控制柜的“伺服开启”按钮,等待变绿后方可操作。
2)运行机械臂教学软件,进入软件主界面,点击“机械臂复位”按钮,复位后点击“机械臂示教”按钮,弹出示教窗口。
3)在“示教速度控制”内,通过移动指针选择示教速度。
4)在“示教盒”内,通过控制各关节的运动方向、手爪状态等按钮来控制机械臂示教运动。当每个关节运动到关键位置处,需按下“记录”按钮记录下示教信息,直至整个搬运装配过程完成。
5)点击“保存”按钮,保存示教文件。
6)点击“复位”按钮,机械臂回到笛卡尔坐标系的原点位置。
7)点击“再现”按钮,机械臂按照记录的机械臂关节信息再现一遍运动轨迹。
8)点击“清零”按钮,清除关节信息、末端点信息和示教信息列表。
9)点击“复位”按钮,机械臂做回零运动。
10)如果想再现第二次,只需点击“打开”按钮,找到相应示教文件,然后点击“识别示教点”,重复6)、7)、
8)、9) 步骤即可。
11)关闭教学机械臂软件。按下教学机械臂控制柜的“伺服关闭”按钮,等待变红后,旋转控制柜上钥匙,关闭电源开关。
六、思考题
1.指出机械臂各关节所采用的执行元件和传动部件。
2.怎么控制气动手爪的夹持力?怎样调节气动手爪的移动速度?
3.通过本实验总结机械臂示教-再现的概念。
4.机械臂在运动控制过程中,梯形曲线运动和S形曲线运动模式各有什么特点?
5.机械臂的PTP运动控制与CP运动控制方式各有何特点?举出机械臂在工业控制中PTP控制和CP控制的实例?
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底