
机械臂的结构设计
机械臂的结构设计是机器人学中的一个关键领域,它涉及确定机械臂各个部分的几何形状、尺寸、材料和连接方式,以实现所需的运动性能和功能。机械臂的结构设计需要考虑多种因素,包括机械臂的工作环境、负载能力、运动范围、精度要求等。
基本概念
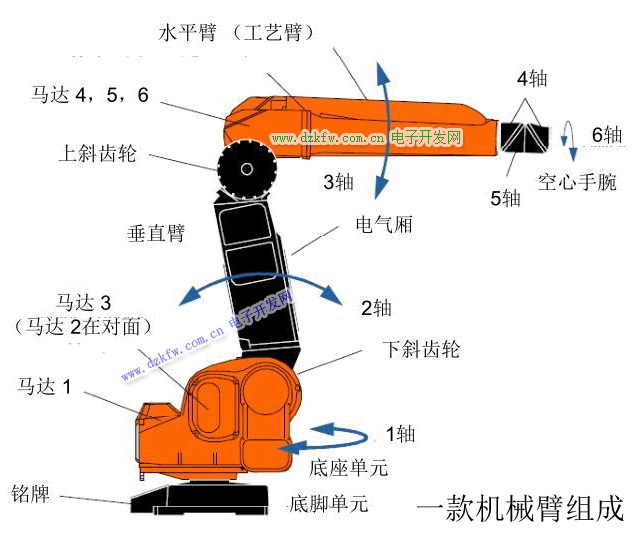
- 机械臂的组成:
- 机械臂通常由以下部分组成:基座(base)、臂杆(links)、关节(joints)、末端执行器(end-effector)和驱动器(actuators)。
- 基座是机械臂的固定部分,通常位于工作台的顶部或墙壁上。
- 臂杆是连接基座和末端执行器的多个刚性或柔性部件。
- 关节是连接臂杆的旋转或滑动部件,允许机械臂在不同方向上移动。
- 末端执行器是机械臂的末端,用于执行各种任务,如抓取、装配、焊接等。
- 驱动器是用于驱动关节运动的装置,如电机、液压缸等。
- 机械臂的运动学:
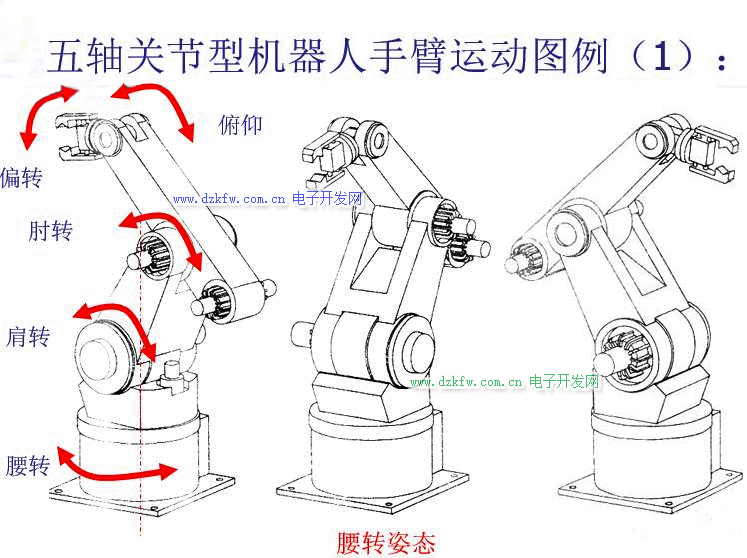
- 机械臂的运动学涉及计算机械臂的各个关节如何移动以使末端执行器达到特定的位置和姿态。
- 运动学分为正运动学和逆运动学,正运动学计算末端执行器的位置和姿态,而逆运动学计算关节状态。
设计原则
- 工作环境适应性:
- 机械臂的结构设计需要考虑工作环境的特点,如温度、湿度、灰尘、振动等。
- 机械臂的结构需要能够适应不同的工作环境,以保证其稳定性和可靠性。
- 负载能力:
- 机械臂的结构设计需要考虑其负载能力,确保机械臂在执行任务时能够承受所需的负载。
- 机械臂的结构需要具有足够的强度和刚度,以承受工作过程中的力和力矩。
- 运动范围和精度:
- 机械臂的结构设计需要考虑其运动范围和精度要求,确保机械臂能够覆盖所需的工作空间,并达到所需的定位精度。
- 机械臂的结构需要具有足够的灵活性和刚度,以满足不同任务的需求。
- 维护和操作便利性:
- 机械臂的结构设计需要考虑维护和操作的便利性,确保机械臂的各个部分易于拆卸、更换和调整。
- 机械臂的结构需要具有合理的布局和紧凑的设计,以方便操作人员的操作和维护。
设计步骤
- 需求分析:
- 确定机械臂的工作任务和性能要求,包括负载能力、运动范围、精度要求等。
- 分析工作环境的特点,确定机械臂的结构设计需要考虑的因素。
- 概念设计:
- 提出多个机械臂结构设计方案,包括不同的臂杆布局、关节类型和驱动方式等。
- 对各个设计方案进行比较和评估,选择最优的设计方案。
- 详细设计:
- 根据概念设计方案,确定机械臂各个部分的具体尺寸、材料和连接方式。
- 进行结构分析和计算,确保机械臂的结构设计满足强度、刚度和运动学要求。
- 原型制造和测试:
- 制造机械臂的原型,并进行实际操作和测试。
- 根据测试结果对机械臂的结构设计进行调整和优化。
关节模块
机器人中关节模块是最为重要的硬件之一,其能驱动连杆进行运动从而实现机器人在任务空间中的作业。关节模块一般分为:电机、减速器、编码器、抱闸、驱动器。
- 电机:关节电机。
- 减速器:提高电机的输出力矩,同时提高电机的位置控制精度。
- 编码器:为电机的位置、速度提供基本信息反馈。
- 抱闸:实现断电自锁。
- 驱动器:对关节电机实现位置、速度以及电流的闭环控制。
2.
关节模块是机械臂中的关键组成部分,它负责连接机械臂的不同臂段,并允许臂段在一定范围内进行旋转或线性移动。关节模块的设计和性能直接影响到机械臂的运动范围、灵活性、精度和负载能力。
基本概念
- 关节类型:
- 旋转关节:允许机械臂在一定范围内旋转,如球关节、旋转关节、旋转关节等。
- 线性关节:允许机械臂在一定范围内线性移动,如滑块关节、直线电机等。
- 关节自由度:
- 关节自由度是指关节能够移动的方向数,如旋转关节通常有两个自由度(绕x轴和y轴旋转),线性关节通常有一个自由度(沿z轴移动)。
- 关节参数:
- 关节参数是指描述关节运动特性的数值,如关节的行程、转速、扭矩等。
- 关节驱动器:
- 关节驱动器是用于驱动关节运动的装置,如电机、液压缸等。
关节电机是机械臂关节模块中的关键驱动组件,它负责为机械臂的各个关节提供动力,使其能够按照预定的轨迹和速度进行运动。关节电机的设计和性能直接影响到机械臂的灵活性、精度和响应速度。
基本概念
- 类型:
- 直流电机:常用于小型和中等负载的机械臂,具有较好的控制精度和响应速度。
- 交流电机:适用于大型和重型机械臂,具有较高的扭矩和功率。
- 步进电机:通常用于精度要求较高的应用,能够提供精确的位置控制。
- 伺服电机:结合了直流电机和步进电机的优点,能够提供精确的速度和位置控制。
- 控制方式:
- 开环控制:电机直接根据输入信号工作,不进行反馈调整。
- 闭环控制:电机的工作状态通过传感器进行实时反馈,根据反馈信息调整电机的工作。
- 接口:
- 关节电机通常通过电机驱动器与控制系统连接,驱动器负责电机的电流控制和速度调节。
设计原则
- 负载能力:
- 关节电机的选择需要考虑机械臂的负载能力,确保电机能够承受所需的力和力矩。
- 精度和响应速度:
- 关节电机的选择需要考虑其精度和响应速度,确保电机能够在不同位置和姿态下实现精确的定位和快速响应。
- 可靠性和维护性:
- 关节电机的选择需要考虑其可靠性和维护性,确保电机在长时间运行和恶劣工作环境中能够保持稳定性和可靠性,并易于进行维护和更换。
结论
机械臂的结构设计是机器人学中的一个关键领域,它涉及到确定机械臂各个部分的几何形状、尺寸、材料和连接方式,以实现所需的运动性能和功能。通过合理的设计,可以确保机械臂能够适应工作环境、承受负载、覆盖所需的工作空间,并达到所需的定位精度。
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底