
怠速电机位置传感器的工作原理与检测方法
汽车维修技术网 发布于 01-28
怠速电机位置传感器安装位置
怠速电机位置传感器一般安装在节气门体内,与怠速电机连在一起。
怠速电机位置传感器作用
怠速电机位置传感器用于检测电机的实际位置,并向发动机ECU提供反馈信号,以判断电机是否正常工作。
怠速电机位置传感器结构
电路连接
怠速电机位置传感器工作原理
发动机ECU向两个霍尔效应传感器提供5V参考电压。当电机旋转时,正齿轮B上的磁体在齿转传动下也旋转。这些磁体向ISC阀位置传感器提供脉冲。电磁脉冲由霍尔效应传感器接收,根据电机位置的变化将5V参考电压接地或不接地时,被转化为5V或0脉冲信号,该信号被发动机ECU用于监测ISC阀位置。正齿轮B每旋转一周,每一个霍尔效应传感器产生4个5V方波输入脉冲,被输送至发动机ECU。但由于两个霍尔效应传感器存在相位上的差异,第一个被触发的霍尔效应传感器使发动机ECU能够确定电机的方向。
怠速电机位置传感器检测方法
(1)故障检测
ISC电机有故障会导致发动机怠速不稳,怠速过高、怠速过低、加速或减速熄火,开空调和开大灯、转向时发动机不提速等现象。
(2)检测供电电源
由于霍尔式传感器在工作时需要提供工作电压和参考电压,因此需要对传感器的工作电压线路和参考电压进行测量。
(3)解码器检测
使用三菱专用检测仪MUT可对阀位置传感器信号进行检测。检测工具的显示单位为步,并且在怠速的情况下应该随发动机负荷的变化而变化。
如果发动机ECU要求改变怠速马达的位置,而发动机ECU在电机位置传感器的反馈中并未检测到该变化,或者位置传感器未提供正确的反馈,那么发动机ECU将设置一个诊断故障码为“25”。电机或电机位置传感器所产生的故障均会导致出现这种情况。
当ISC电机位置传感器出现故障时,即使实际位置不是0步,而检测工具上也可能显示0步或者120步。
(4)示波器检测
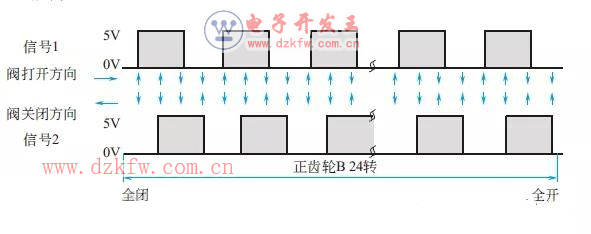
可以使用示波器验证电机位置传感器输出波形,判断其工作是否正常。正常输出波形如图2-118所示。使用示波器检测,可以在点火开关打开、线路连接正常的情况下,将示波器探针从两个信号端分别拾取信号,信号输出波形应该是5V高电位和0V低电位交替出现,正齿轮B旋转一周,两个传感器都应有4个高电位脉冲出现。
怠速电机位置传感器一般安装在节气门体内,与怠速电机连在一起。
怠速电机位置传感器作用
怠速电机位置传感器用于检测电机的实际位置,并向发动机ECU提供反馈信号,以判断电机是否正常工作。
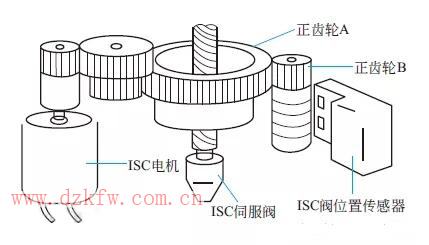
怠速电机位置传感器结构
三菱太空4G63发动机采用了双向直流可逆电机怠速控制系统(ISC系统),双向直流可逆电机采用5V电压的可逆式直流电机,直流ISC电机不是直接推动节气门打开,而是控制怠速旁通空气道的大小。该发动机的怠速电机位置传感器由两个霍尔效应传感器组成。
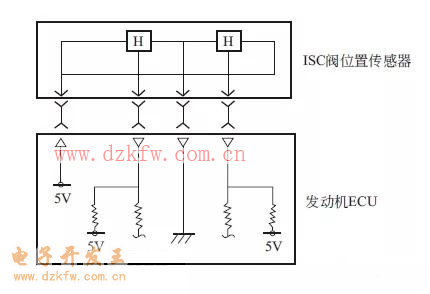
电路连接
怠速电机位置传感器与ECU的连接如下图所示。
怠速电机位置传感器工作原理
发动机ECU向两个霍尔效应传感器提供5V参考电压。当电机旋转时,正齿轮B上的磁体在齿转传动下也旋转。这些磁体向ISC阀位置传感器提供脉冲。电磁脉冲由霍尔效应传感器接收,根据电机位置的变化将5V参考电压接地或不接地时,被转化为5V或0脉冲信号,该信号被发动机ECU用于监测ISC阀位置。正齿轮B每旋转一周,每一个霍尔效应传感器产生4个5V方波输入脉冲,被输送至发动机ECU。但由于两个霍尔效应传感器存在相位上的差异,第一个被触发的霍尔效应传感器使发动机ECU能够确定电机的方向。
正齿轮的运行范围为24转,可使伺服阀从全闭状态转变为全开状态。该24转运行范围可换算为96步运行范围(24转×4个脉冲/转)。所以,ISC电机的运行范围为0(全闭)~(全开)。
怠速电机位置传感器检测方法
(1)故障检测
ISC电机有故障会导致发动机怠速不稳,怠速过高、怠速过低、加速或减速熄火,开空调和开大灯、转向时发动机不提速等现象。
(2)检测供电电源
由于霍尔式传感器在工作时需要提供工作电压和参考电压,因此需要对传感器的工作电压线路和参考电压进行测量。
(3)解码器检测
使用三菱专用检测仪MUT可对阀位置传感器信号进行检测。检测工具的显示单位为步,并且在怠速的情况下应该随发动机负荷的变化而变化。
如果发动机ECU要求改变怠速马达的位置,而发动机ECU在电机位置传感器的反馈中并未检测到该变化,或者位置传感器未提供正确的反馈,那么发动机ECU将设置一个诊断故障码为“25”。电机或电机位置传感器所产生的故障均会导致出现这种情况。
当ISC电机位置传感器出现故障时,即使实际位置不是0步,而检测工具上也可能显示0步或者120步。
(4)示波器检测
可以使用示波器验证电机位置传感器输出波形,判断其工作是否正常。正常输出波形如图2-118所示。使用示波器检测,可以在点火开关打开、线路连接正常的情况下,将示波器探针从两个信号端分别拾取信号,信号输出波形应该是5V高电位和0V低电位交替出现,正齿轮B旋转一周,两个传感器都应有4个高电位脉冲出现。
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底