
MPU6050是一款9轴运动处理传感器。它集成了3轴MEMS陀螺仪,3轴MEMS加速度计,以及一个可扩展的数字运动处理器DMP(Digital MoTIon Processor),可用I2C接口连接一个第三方的数字传感器,比如磁力计。扩展之后就可以通过其I2C或SPI接口输出一个9轴的信号(SPI接口仅在MPU-6000可用)。MPU-6050也可以通过其I2C接口连接非惯性的数字传感器,比如压力传感器。

MPU6050是6轴运动处理传感器,它集成了3轴MEMS陀螺仪,3轴MEMS加速度计,以及一个可扩展的数字运动处理器DMP。使用它就是为了得到待测物体(如四轴飞行器、平衡小车)x、y、z轴的倾角(俯仰角Pitch、翻滚角Roll、偏航角Yaw)。我们通过 I2C 读取到 MPU6050 的六个数据(三轴加速度 AD 值、三轴角速度 AD 值)经过姿态融合后就可以得到 Pitch、Roll、Yaw角。

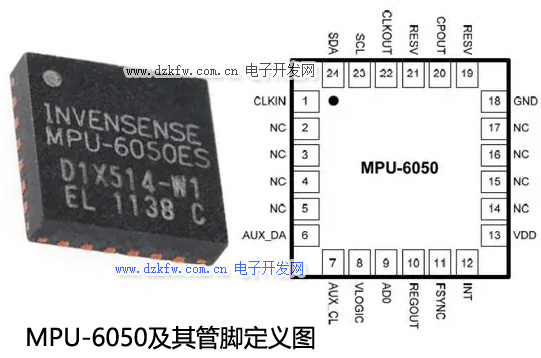
作为测量值的方向参考,传感器坐标方向定义如上图所示,属于右手坐标系(右手拇指指向 x 轴的正方向,食指指向 y 轴的正方向,中指能指向 z 轴的正方向)。
要想知道MPU6050工作原理,得先了解下面俩个传感器:
①陀螺仪传感器:
陀螺仪的原理就是,一个旋转物体的旋转轴所指的方向在不受外力影响时,是不会改变的。人们根据这个道理,用它来保持方向。然后用多种方法读取轴所指示的方向,并自动将数据信号传给控制系统。我们骑自行车其实也是利用了这个原理。轮子转得越快越不容易倒,因为车轴有一股保持水平的力量。现代陀螺仪可以精确地确定运动物体的方位的仪器,它在现代航空,航海,航天和国防工业中广泛使用的一种惯性导航仪器。传统的惯性陀螺仪主要部分有机械式的陀螺仪,而机械式的陀螺仪对工艺结构的要求很高。70年代提出了现代光纤陀螺仪的基本设想,到八十年代以后,光纤陀螺仪就得到了非常迅速的发展,激光谐振陀螺仪也有了很大的发展。光纤陀螺仪具有结构紧凑,灵敏度高,工作可靠。光纤陀螺仪在很多的领域已经完全取代了机械式的传统的陀螺仪,成为现代导航仪器中的关键部件。光纤陀螺仪同时发展的除了环式激光陀螺仪外。
②加速度传感器:
加速度传感器是一种能够测量加速度的传感器。通常由质量块、阻尼器、弹性元件、敏感元件和适调电路等部分组成。传感器在加速过程中,通过对质量块所受惯性力的测量,利用牛顿第二定律获得加速度值。根据传感器敏感元件的不同,常见的加速度传感器包括电容式、电感式、应变式、压阻式、压电式等。
其实说简单点,在mpu6050中我们用陀螺仪传感器测角度,用加速度传感器测加速度。

MPU-60X0 对陀螺仪和加速度计分别用了三个 16 位的 ADC,将其测量的模拟量转化 为可输出的数字量。为了精确跟踪快速和慢速的运动,传感器的测量范围都是用户可控的, 陀螺仪可测范围为±250,±500,±1000,±2000°/秒(dps),加速度计可测范围为±2,±4, ±8,±16g。 一个片上 1024 字节的 FIFO,有助于降低系统功耗。 和所有设备寄存器之间的通信采用 400kHz 的 I2C 接口或 1MHz 的 SPI 接口(SPI 仅 MPU-6000 可用)。对于需要高速传输的应用,对寄存器的读取和中断可用 20MHz 的 SPI。 另外,片上还内嵌了一个温度传感器和在工作环境下仅有±1%变动的振荡器。 芯片尺寸 4×4×0.9mm,采用 QFN 封装(无引线方形封装),可承受最大 10000g 的冲 击,并有可编程的低通滤波器。 关于电源,MPU-60X0 可支持 VDD 范围 2.5V±5%,3.0V±5%,或 3.3V±5%。另外 MPU-6050 还有一个 VLOGIC 引脚,用来为 I2C 输出提供逻辑电平。VLOGIC 电压可取 1.8±5%或者 VDD。
作为一款物理传感器,其工作原理是利用物理效应,诸如压电效应,磁致伸缩现象,离化、极化、热电、光电、磁电等效应,将被测信号量的微小变化转换成电信号。
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底