
������������һ��ͨ�����ת����������ϵĻ�е����λ����ת����������������Ĵ�����������ĿǰӦ�����Ĵ������������������ɹ�դ�̺����װ����ɡ���դ������һ��ֱ����Բ���ϵȷֵؿ�ͨ���ɸ������οס����ڹ��������綯��ͬ�ᣬ�綯����תʱ����դ����綯��ͬ����ת������������ܵȵ���Ԫ����ɵļ��װ�ü��������������źţ���ԭ��ʾ��ͼ��ͼ1��ʾ��ͨ������ÿ����������������ĸ������ܷ�ӳ��ǰ�綯����ת�١����⣬Ϊ�ж���ת�������̻����ṩ��λ���90�����·�����źš��

���ݼ��ԭ�����������ɷ�Ϊ��ѧʽ����ʽ����Ӧʽ������ʽ��������̶ȷ������ź������ʽ���ɷ�Ϊ����ʽ������ʽ�Լ����ʽ���֡�
1.����ʽ������
����ʽ��������ֱ�����ù��ת��ԭ��������鷽������A��B��Z�ࣻA��B����������λ��90��Ӷɷ�����жϳ�н���Z��Ϊÿתһ�����壬���ڻ��㶨λ�������ŵ���ԭ���������еƽ���������ڼ���Сʱ���ϣ�����������ǿ���ɿ��Ըߣ��ʺ��ڳ����봫�䡣��ȱ�����������ת���ľ���λ����Ϣ��
2.����ʽ������
���Ա�������ֱ������������Ĵ�������������Բ���������ؾ���������ͬ�������ÿ����������Ͳ���������������ɣ����������������Ŀ��˫����ϵ�������ϵ�������������Ķ����������λ���������̵�һ���ǹ�Դ����һ���Ӧÿһ�����һ����Ԫ���������̴��ڲ�ͬλ��ʱ��������Ԫ�������ܹ������ת������Ӧ�ĵ�ƽ�źţ��γɶ������������ֱ��������ص��Dz�Ҫ����������ת�������λ�ö��ɶ���һ���̶�����λ�����Ӧ�������롣��Ȼ�����Խ�࣬�ֱ��ʾ�Խ�ߣ�����һ������ Nλ�����Ʒֱ��ʵı������������̱�����N�������Ŀǰ��������16λ�ľ��Ա�������Ʒ��
����ʽ��������������Ȼ�����ƻ�ѭ�������ƣ������룩��ʽ���й��ת���ġ�����ʽ������������ʽ��������֮ͬ������Բ�����⡢���������ͼ�Σ����Ա������������ɱ��룬���ݶ��������ϵı��룬������λ�á��������ƿɲ��ö������롢ѭ���롢�����Ʋ���ȡ������ص��ǣ�
1)����ֱ�Ӷ����Ƕ�����ľ���ֵ��
2)û���ۻ���
3)��Դ�г���λ����Ϣ���ᶪʧ�����Ƿֱ������ɶ����Ƶ�λ���������ģ�Ҳ����˵����ȡ����λ����Ŀǰ��10λ��14λ�ȶ��֡�
3.���ʽ����ֵ������
���ʽ����ֵ�������������������Ϣ��һ����Ϣ���ڼ��ż�λ�ã����о�����Ϣ���ܣ���һ������ȫͬ����ʽ�������������Ϣ��
����������һ�ֽǶȣ����ٶȣ����װ�ã������������ĽǶ��������ù��ת��ԭ��ת������Ӧ�ĵ���������������������С�����ȸߣ������ɿ�,�ӿ����ֻ����ŵ㡣���㷺Ӧ�������ػ�������ת̨���ŷ������������ˡ��״����Ŀ��ⶨ����Ҫ���Ƕȵ�װ�ú��豸�С�
��������������Ӧ�õ�·
2.1 EPC��755A����������Ӧ��
EPC��755A���������߱����õ�ʹ�����ܣ��ڽǶȲ�����λ�Ʋ���ʱ������������ǿ���������ȶ��ɿ�����������źţ��Ҹ������źž�������ɵõ��������������źš���ˣ�����������������ʻģ����ʱ���Է�������ת�ǶȵIJ���ѡ��EPC��755A����������Ϊ���������������·ѡ�ü��缫��·�ͣ�����ֱ���ѡ��360������/Ȧ�����ǵ�����������ת����˫��ģ��ȿ�˳ʱ����ת��Ҳ����ʱ����ת����Ҫ�Ա�����������źż������ܼ�����ͼ2�����˹�������ʵ��ʹ�õļ�����˫�������·�������·��1��D��������2���������ɣ�������·��3Ƭ74LS193��ɡ�
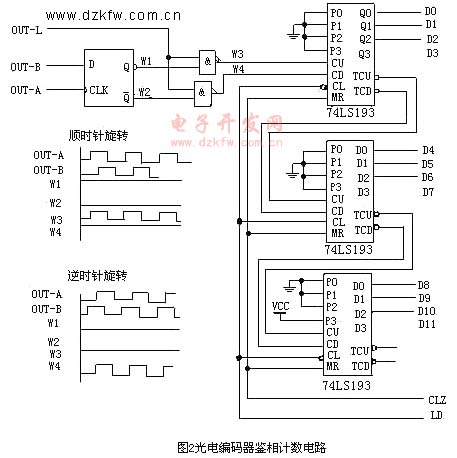
����������˳ʱ����תʱ��ͨ��A������γ�ǰͨ��B�������90�㣬D���������Q(����W1)Ϊ�ߵ�ƽ��Q(����W2)Ϊ�͵�ƽ����������Ŵ���������ͨ��(����W3)������˫�������74LS193�ļ����������CU�����мӷ���������ʱ����������Źرգ������Ϊ�ߵ�ƽ(����W4)��������������ʱ����תʱ��ͨ��A������α�ͨ��B��������ӳ�90�㣬D���������Q(����W1)Ϊ�͵�ƽ��Q(����W2)Ϊ�ߵ�ƽ����������Źرգ������Ϊ�ߵ�ƽ(����W3)����ʱ����������Ŵ���������ͨ��(����W4)������˫�������74LS193�ļ����������CD�����м���������
����������˳ʱ�����ʱ����תʱ���������ת�ǶȾ�Ϊ��Ȧ�룬ѡ�÷ֱ���Ϊ360������/Ȧ�ı���������������������Ϊ900����ʵ��ʹ�õļ�����·��3Ƭ74LS193��ɣ���ϵͳ�ϵ��ʼ��ʱ���ȶ�����и�λ(CLR�ź�)���ٽ����ֵ��Ϊ800H����2048(LD�ź�)����ˣ���������˳ʱ����תʱ��������·�������ΧΪ2048��2948������������ʱ����תʱ��������·�������ΧΪ2048��1148��������·���������D0��D11�������ݴ�����·��
ʵ��ʹ��ʱ��������Ƶ���ؽ���˳ʱ�����ʱ��ת�������ڴ��������������ϳ�һ��ʱ������̻���ʱ������·������ܲ���2048�������м����ֵ�ƫ�Ϊ�����һ���⣬����������һ�������̻��м���·��ϵͳ���������ݴ�����·��ģ�������ڷDz���״̬ʱ��ϵͳ�����м���·���������̴��ڻ���״̬����������·�������������2048���ɶԼ�����·���и�λ�����������ó�ֵ��
2.2 ���������������������е�Ӧ��
������תʽ����������������ת���������������в�����ť�������������������в�����ť�Ľ�λ����ת��Ϊij�ֵ��ź�������תʽ�������������֣����Ա�������������������
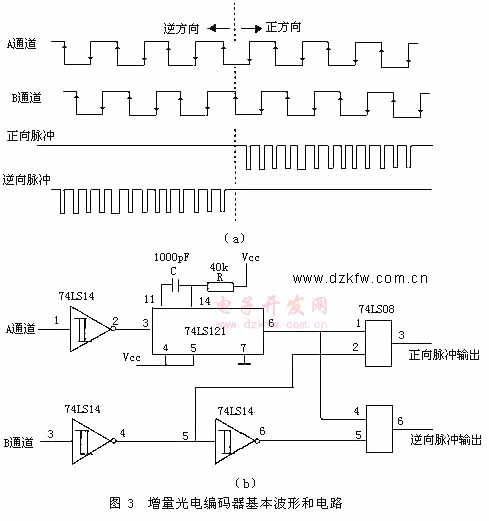
��������������������ʽ����Ĵ������������̱Ⱦ��Ա���������Ҫ�ö��ҷֱ��ʸ��ߡ�һ��ֻ��Ҫ�����������������ʵ�����Ѳ����о��Ա�������������壬���Dz����������塣�������̵�������м������Ŀ��ͬ���ȷֲ�����Ͳ��������������դ����������������������������������ת��ʱ����������ź�����λ��Ϊ90���A���B�������ź��Լ�ֻ��һ��������ĵ�������������������źţ�����Ϊ���̵Ļ�λ�ã�������ϵͳ�ṩһ����ʼ����λ�źţ�����A��B��������źŵ���λ��ϵ����ǰ���ͺ��ж���ת�ķ�����ͼ3��a���ɼ�����������תʱ��A�����岨�α�B����ǰ��/2������תʱ��A�������B���ͺ��/2��ͼ3��b����һʵ�ʵ�·����A�����β������ش�������̬��������������B�����β���롯����������תʱֻ������������������֮��ֻ������������������ˣ������������Ǹ����������Դ�����������ȷ�����̵�ת���������Խ�λ������ͨ��������������N�������������źţ�����λ��Ϊ��/ N���ɼ�������Ϊ2N����դ��������N=2��ͼ3��·��ȱ������ʱ�����������������������������ڵ�ijһ���źŴ��ڡ��ߡ��͡���ƽ״̬������һ���ź������ڡ��ߡ��� ���͡�֮��������仯״̬����ʱ������Ȼδ����λ�ƣ����ǻ�����������������塣���磬���̷����������ֶ���λ��ʱ��������Կ������������Dz���ʱ�ͻ��������������
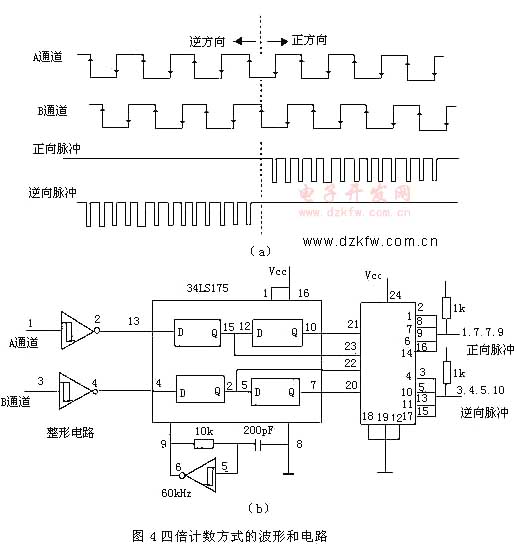
ͼ4��һ�����ܷ�ֹ������������߷ֱ��ʵ��ı�Ƶϸ�ֵ�·��������������м��书�ܵ�D�ʹ�������ʱ�ӷ�����·����ͼ4�ɼ���ÿһ��������D���������ӣ���������ʱ������ļ���У�����Q�ˣ����ӦB����74LS175�ĵ�2��7���ţ�����ǰ����ʱ���ڵ�����״̬����������ͬ�����ʾʱ�Ӽ�����ޱ仯�������Ը������߹�ϵ�жϳ����ı仯���Ӷ�������������������塣��ij���������ڡ��ߡ������͡��������仯ʱ����������������͡��������壬���ڶ�����������ȡ������ʱ�Ϳ��������ǵ�Ӱ�죨���������Ķ���Ҳ���漰��㣩���ɴ˿ɼ���ʱ�ӷ�������Ƶ��Ӧ������Ƶ�ʵĿ������ֵ����ͼ4���ɿ�������ԭһ�������źŵ������ڣ��õ����ĸ��������塣���磬ԭÿȦ������Ϊ1000�ı������ɲ���4��Ƶ����������4000������ֱ���Ϊ0.09�㡣ʵ���ϣ�Ŀǰ���ഫ������Ʒ��������Ԫ������źŵķŴ����εȵ�·�봫�м��Ԫ����װ��һ������ֻҪ����ϸ���������·�Ϳ������һ����λ�Ʋ���ϵͳ(74159��4-16������)��
 ���ض���
���ض��� ˢ��ҳ��
ˢ��ҳ�� �µ�ҳ��
�µ�ҳ��