
无人机(Unmanned Aerial Vehicle),指的是一种由动力驱动的、无线遥控或自主飞行、机上无人驾驶并可重复使用的飞行器,飞机通过机载的计算机系统自动对飞行的平衡进行有效的控制,并通过预先设定或飞机自动生成的复杂航线进行飞行,并在飞行过程中自动执行相关任务和异常处理。
本篇博客主要介绍多旋翼无人机系统基本组成
多旋翼无人机基本组成
机械系统
多旋翼无人机的机械系统主要包括
- 机身
- 机臂
- 起落架

多轴飞行器的机身结构多种多样,根据可连接机臂数量区分可分为四轴、六轴、八轴。不同机臂数量各有各的优势,根据应用场合不同可灵活选择,四轴飞行器的优势是航时长,结构简单;六轴和八轴飞行器要比四轴飞行器航时低,但其飞行稳定性相对四轴飞行器有所提高,六轴和八轴飞行器另外一个优点是在飞行过程中其中一个机臂出现问题造成电机停转后另外机臂依然可以控制飞行器保持平稳,这项冗余功能是四轴飞行器所不具备的。在行业应用要求高航时例如植保、电力巡线可采用四轴飞行器,在航拍、摄影等要求飞行器稳定、安全可采用六轴飞行器。
四轴飞行器依据其机身布局结构可分为“十”型和“X”型。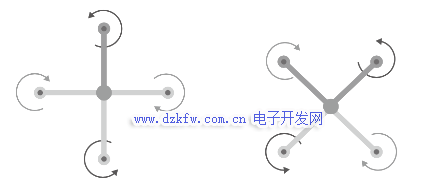
四轴飞行器,也可以同轴共桨,就是一个电机,有上下两个桨,这样可以使得飞行器的负载能力提高,但是弊端就是会降低飞行时间。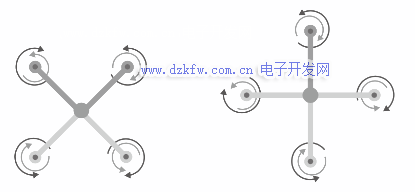
多旋翼飞行器机臂用于连接机身与电机,其连接件结构硬度要强,否则会造成机身振动增大飞控姿态解算误差。起落架的作用是在无人机起飞和降落时起到缓冲的作用。
动力系统
旋翼无人机动力系统包括无刷电机、电子调速器、Li-Po电池、螺旋桨。
以四旋翼为例,动力系统的框图如下图所示,电池连接分电板,分电板连接电调,电调连接电机,电机连接螺旋桨,构成一路的动力系统,四旋翼则有四路。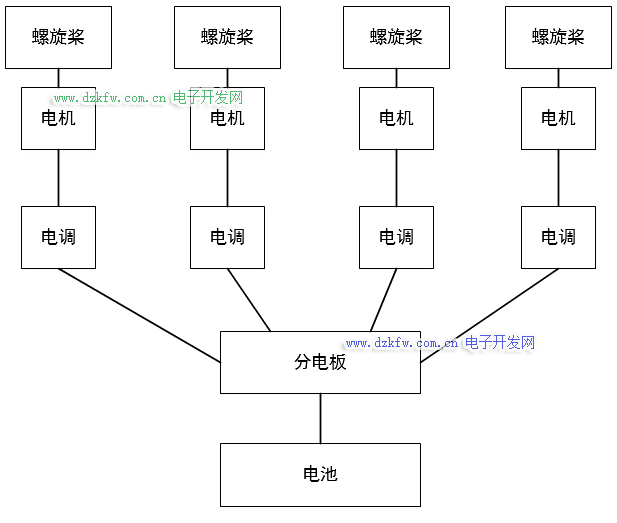
直流无刷电机

无刷电机是指无电刷和换向器(或集电环)的电机,又称无换向器电机,由主体和驱动器组成,是一种典型的机电一体化产品无刷电机具有工作效率高、调速范围广、可靠性高、稳定性好及过载能力强等特点。
无刷电机有多种型号,基本参数有
- 直径
- 高度
- KV值
根据应用飞机情况不同需选用相应参数的电机。
电机的直径与高度与机臂上的电机托相关,KV值与无人机的轴距相关,电机的KV值与电机扭矩成反比,一般大轴距的飞机要配低KV值大尺寸的螺旋桨,来产生较高的拉力,小轴距的飞机要配高KV值小尺寸的螺旋桨,来调节更加精细。
例如:飓风牌U2810 KV750直流无刷电机
其中U2810代表电机直径28mm,高度10mm,KV750表示电机在空载情况下,电机的输入信号每增加1V,电机的转速增加750rmp
电子调速器

直流无刷电子调速器(Electronic Speed Control,ESC),通常简称为电调,功能为接收飞控端发出的PWM信号,驱动和调节直流无刷电机。
电调有四种保护功能:
- 启动保护:如果当推油门动作执行后,两秒内,马达未能正常启动,此时电调将会自动关闭马达,油门需再次拉到最低后,才可以重新启动。
- 温度保护:当电调工作温度过高,超过110℃时,电调会自动降低输出功率,但不会将输出功率全部关闭,最多只降到全功率的40%,避免摔机。
- 假如发生遥控器油门信号持续丢失1秒,电调会自动检测到该情况,并开始逐渐降低输出功率,在降低期间信号依然未恢复,则会一直降低到零输出。若在降低期间信号恢复,则立即恢复油门控制。
- 过负荷保护:当负载突然变很大时,电调会切断动力,或自动重启。
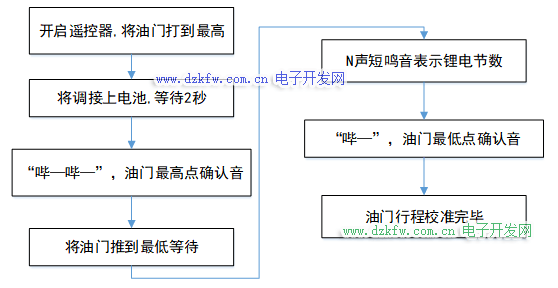
在首次使用无刷电子调速器时为了让电调适应遥控器油门行程,需要进行油门行程校准。校准的流程如下:
Li-Po电池
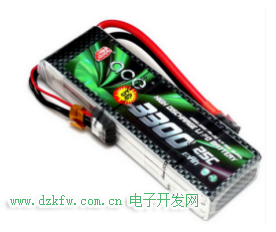
Li-Po电池为整个无人机系统提供能量来源,锂聚合物电池相比传统的镍镉电池具有性能高、体积小、质量轻、容量大、散热快等特点在无人机领域得到了广泛的使用。Li-Po电池单节电压为3.7v,满电电压为4.2v。
螺旋桨

多旋翼无人机系统通过电机带动螺旋桨旋转,向下吹风产生向上推力,是无人机动力系统中不可或缺的一部分。
按材料分螺旋桨可分为:
- 碳纤维
- 木桨
- 注塑桨
木桨的材料多为榉木,硬度高,重量轻,经过风干打蜡上漆以后不怕受潮,在航空史上,木桨在早期扮演了非常重要的角色。碳纤维是一种与人造丝,合成纤维一样的纤维状碳材料。由于碳纤维的材料原因,它有优异的硬度和合适的浆型,效率优于木桨。以上两种桨的价格都过高,对于一般使用者都选择注塑桨。
螺旋桨的型号由如8045,1038等4位数字表示,分别代表桨叶两个重要的参数,桨直径和桨螺距。桨直径是指桨转动所形成的圆的直径,对于双叶桨(两片桨叶,这是最常用的桨)恰好是两片桨叶长度之和,由前两位数字表示,如上面的80和10,单位为英寸。桨螺距则代表桨旋转一周前进的距离,由后两位数字表示,如上面的45和38。桨直径和螺距越大,桨能提供的拉(推)力越大
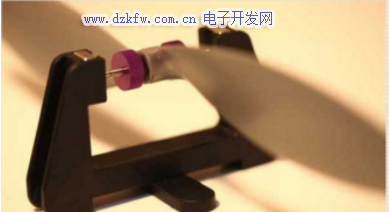
桨叶会随着电机高速旋转,所以其旋转平衡是一个很重要的指标。如果桨叶有一头重一头轻,或者一侧轻一侧重等不平衡问题,那么在旋转时就会产生左右/前后晃动等问题。这样不仅仅动力效率低,而且还可能会损坏电机造成飞机炸机。一般的桨叶都已经进行过自平衡测试,对于要求高的场合也可以自己调节桨叶的自平衡。下面是一种常见的测试自平衡的工具。
飞行控制系统
飞行控制系统(Flight control system),简称飞控,是无人机最重要的部分,相当于无人机的大脑。飞控一般由一块或多块MCU及各种传感器组成。MCU处理相关传感器的信息,经过计算解算出飞机的当前姿态,位置,状态等信息,并根据接收到的来自遥控器或地面站的指令,输出电机的控制信号,使电机转速产生相应变化,改变飞机姿态,达到期望任务。
现在市面上的飞行控制器分为两种。一种是由商业公司设计生产的,例如DJI的Naze系列飞控,一般都是闭源的,并且经过正规系统的测试,稳定性方面有保障。另外一种就是由爱好者或者公司发起的开源飞控,这类飞控的硬件设计和软件代码一般都是开放的,如果有更多的人参与,能够快速迭代改进。


最后上一个完整的无人机系统图如下:
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底